- Svenska
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Hur man väljer en shuntresistor för noggrann strömavkänning
Katalog

Välja ett shuntmotståndsvärde
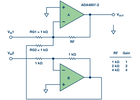
Att välja shuntresistorvärdet sätter tonen för hur strömavkänningskedjan fungerar i den verkliga produkten, inte bara i ett kalkylblad. Ett val berör tre saker på samma gång:
• den fullskala känselsignalspänning du kan arbeta med
• den värme som motståndet kommer att skapa
• den extra spänningsfall lasten kommer att känna.
I praktiken handlar det ofta om hur bekväm du vill att signalmarginalen ska vara kontra hur mycket förlust och marginal du är villig att leva med.
Många team känner dragningen mot så liten som möjligt på R för effektivitet; den instinkten är förståelig. Problemet är att låg shuntspänning tenderar att göra små, tråkiga icke-idealiteter till långa felsökningssessioner.
Börja med att välja en shuntspänning vid maximal ström som din förstärkare och ADC kan fånga upp med luftutrymme över tolerans, temperatur och brus. En allmänt använd fullskala fönster är ungefär:
• 50–100 mV
medan högreffekt- eller tight-headroomkonfigurationer ofta hamnar närmare:
• 10–30 mV
för att minska dissipationen och skydda lasten spänning.
Vad som vanligtvis avgör om ett mål känns "bekvämt" senare är inte siffran i sig, utan hur långt det sitter över de fel du faktiskt kommer att se på bänken.
En shuntspänning som ser bra ut i en nominell beräkning kan kännas obekvämt liten efter att värsta fallets effekter visar sig:
• offset
• drift
• termiska gradienter
• kvantisering
• störningar
Om du någonsin har sett en nollströmsavläsning vagga under en termisk svep, är den känslomässiga bågen bekant:
• självförtroende vid rumstemperatur
• sedan krypande tvivel
• sedan ett sent nattförsök att åtgärda det i firmware.
Ingångsoffset och drift kan förbruka en överraskande del av en liten shunt-signal. När designen lutar för hårt mot mycket låg VSHUNT, tenderar team ofta att märka att värdet utan belastning vägrar att förbli nära noll över temperatur, och de pressas mot:
• fler kalibreringssteg
• mer kompensationslogik
• eller båda.
Övergångar från koppar till legering kan generera mikrovolt-nivå termoelectriska spänningar i närvaro av temperaturgradienter. Det är lätt att avfärda detta som för litet för att spela roll tills shunten sitter nära:
• en varm induktor
• en MOSFET värmespridare
• en luftflödesgräns där gradienter sker rutinmässigt.
Om ADC:n (inklusive dess brus) endast producerar ett litet antal effektiva räknare över det operativa området, tenderar utdata att se ryckiga ut, och styrloopar kan börja bete sig kinkigt vid lätt belastning. En design som beter sig artigt vid nominell ström kan fortfarande uppvisa kvantiseringdriven svängning när signalen krymper.
Små shuntspänningar är lättare att kontaminera via:
• koppling av switch-nod
• markbounca
• magnetisk upphämtning
• layoutrelaterade parasiter.
När strömbrytande kraftsteg ligger nära varandra tenderar layout- och filtreringsarbetet att växa snabbt när VSHUNT minskas.
En praktisk lösning är att ställa in fullskala VSHUNT så att den hålls bekvämt över den sammanlagda värsta offseten och ljudet vid den mätbandbredd du faktiskt bryr dig om. När signalen är för liten spenderar team ofta dagar på att jaga:
• layoutjusteringar
• filtreringsexperiment
som aldrig känns helt tillfredsställande.
När ett fullskalas shuntspänningsmål har satts, beräkna det första motståndet direkt:
Exempel (50 mV vid 5 A):
R = 0.05 / 5 = 0.01 Ω
Behandla detta som en startankare. Efter denna punkt justeras värdet vanligtvis av:
• termiskt beteende
• huvudutrymmesbegränsningar
• paketeringstillgänglighet
• vad prototypen lär dig.
Efter att ha valt R, beräkna shuntförlusten vid maximal ström:
Exempel:
PSHUNT = 52 × 0.01
PSHUNT = 25 × 0.01
PSHUNT = 0.25 W
Det hjälper att tänka på PSHUNT som en ingång till termisk design snarare än en snabb datasheetkontroll. Även när resistorernas effektnivå ser generös ut kan verkliga monteringarna bli varmare på grund av:
• begränsad koppararea
• värme från närliggande komponenter
• höljesbegränsningar
• svag luftflöde.
Under uppstart är det ganska vanligt att se avläsningar driva efter några minuter när shunten och den omgivande kopparvärmen ökar, vilket skiftar motståndet och drar den mätta strömmen med sig, en upplevelse som kan vara mer irriterande än den låter när du försöker lösa ett stabilitetsproblem i kontrollslingan.
För noggrann strömmätning visas shuntens tolerans och temperaturkoefficient för resistans (TCR) ofta direkt i felbudget, precis bredvid:
• förstärkarbegränsningar
• ADC-begränsningar.
En 1% shunt börjar med ungefär 1% vinstfel innan:
• förstärkaroffset
• ADC-vinstfel
• referensdrift
kommer in i bilden. Om strängare noggrannhet är målet inkluderar typiska vägar:
• använda en shunt med strängare tolerans
• kalibrering i produktionen
• kombinera båda.
Självvärme höjer shunten över omgivningen, och motståndet skiftar med den temperaturökningen. Vid kontinuerlig högströmsdrift kan den avdrift dominera vad du ser i fältet. När temperaturökningen är osäker är det ofta mindre stressigt att anta en större ökning än den ideala modellen förutsäger och sedan verifiera med tidiga hårdvarumätningar (inklusive konstantståndsförsök).
Ökning av VSHUNT förbättrar oftast mätmarginalen genom:
• att släppa offset/ljudtryck på fronten
• att öka signal-till-brusförhållandet
medan:
• att minska effektiviteten
• att stjäla lastspänning.
Minskning av VSHUNT gör det motsatta och tenderar att lägga mer belastning på:
• den analoga fronten
• layoutdisciplin
• digital filtrering.
| Faktor |
Högre VSHUNT |
Lägre VSHUNT |
| Signalmarginal |
Bättre |
Lägre |
| Effektivitet |
Lägre |
Högre |
| Spänningsfall |
Högre |
Lägre |
| ADC-krav |
Mindre krävande |
Mer krävande |
| Brus känslighet |
Lägre |
Högre |
| Effektförlust |
Högre |
Lägre |
Ett mönster som visar sig i utformningar som känns lugna att felsöka är att undvika den absoluta minimala V_SHUNT om inte effektivitet dominerar systemmålen. Att spendera lite huvudutrymme för mätmarginal lönar sig ofta som:
• färre falska skyddstrips
• stadigare kontrollbeteende
• mindre tid att undra om en konstig avläsning är fysik eller en layoutartefakt.
När R faller ner i milliohm-området börjar oönskat seriemotstånd i:
• spår
• vias
• kontakter
• lödningar
att konkurrera med shunten själv. Vid den tidpunkten kan ett extra 1–5 mΩ från rutten och sammankopplingar representera en stor del av det avsedda värdet, och den mätta strömmen kan variera med:
• monteringvariation
• kontaktåldring
• omarbete.
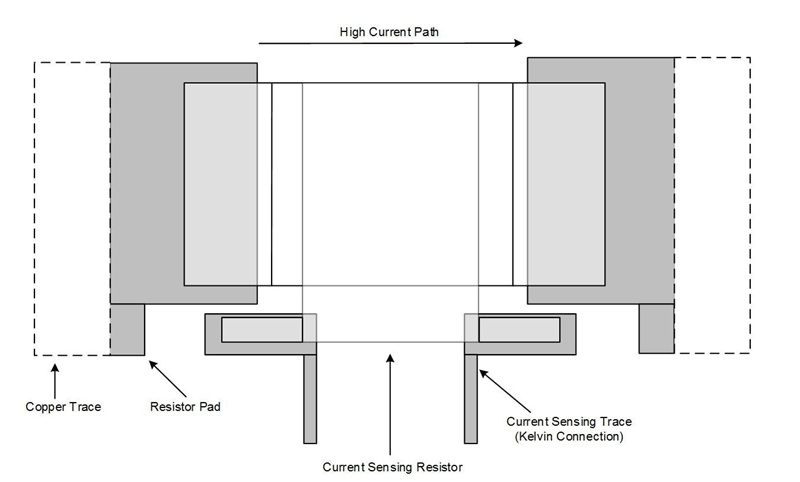
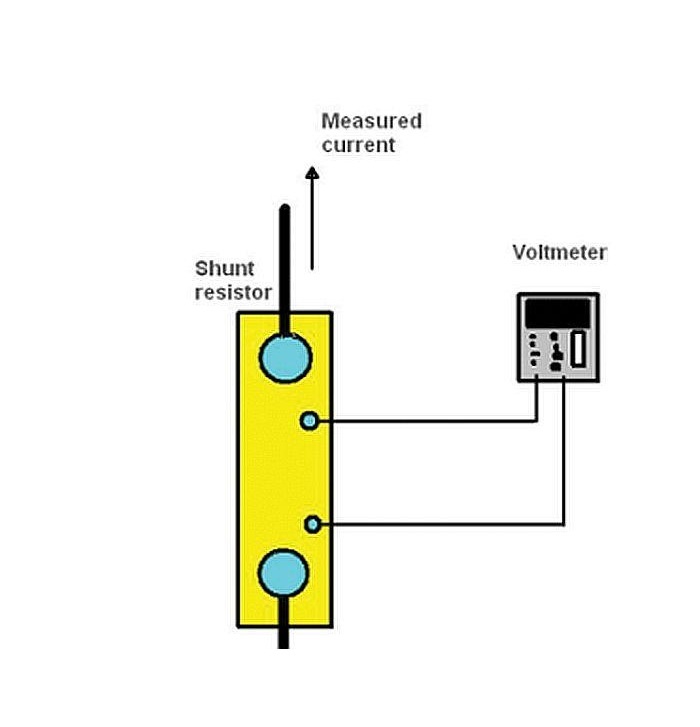
För lågvärdiga shuntar förhindrar fyr-terminalanslutningar med noggrant rutting att lastström kopparfall missförstås som shuntspänning. Utan Kelvin-sensing tenderar felet att vara strömberoende och frustrerande inkonsekvent över byggnader.
Om målet inkluderar snabb transienta fångst kan kraftig filtrering dölja de händelser du försöker mäta; om filtreringen är för lätt kan växlingsvibrationer dominera avläsningen. Valet av motstånd interagerar med filtreringen eftersom det ställer signalamplituden i förhållande till:
• vibration
• upptagning
• ADC-brus.
En strukturerad känslighetskontroll kan leverera mycket av vad folk hoppas att simulering ska ge, med färre dolda antaganden och fler handlingsbara siffror.
För varje kandidat R, beräkna:
• VSHUNT vid IMAX
• PSHUNT vid IMAX
• uppskattad temperaturhöjning (paket + kopparområde + luftflödesantaganden)
• förväntade feltermer (offset, drift, ADC kvantisering och brus).
En pragmatisk metod är att välja det minsta motståndet som fortfarande ger en stabil avläsning över temperatur och driftbrusförhållanden, inklusive lätt belastningsbeteende. Detta tenderar att placera dig i en situation som balanserar effektivitet med mätkonfidence, och det minskar risken för en sen överraskning där noggrannheten ser bra ut kallt på bänken men försämras efter uppvärmning eller när enheten är innesluten i sitt hölje.
Effektförlust och termisk design
Skatta elektriska förluster i verkliga drift-scenarier
En shunt-resistor omvandlar elektrisk energi till värme på ett mycket förutsägbart sätt, och den förutsägbarheten är tröstande, ända tills verkliga driftslägen börjar staplas ovanpå varandra. Börja med grundrelationen: P = I²R.
Exempel på grundlinje: 5 A genom 0.01 Ω → P = 25 × 0.01 = 0.25 W.
Den 0.25 W är en startreferens för diskussion, inte en stopppunkt, eftersom temperaturhöjning och långsiktig motståndsrörelse vanligtvis är vad som utlöser de obehagliga överraskningarna senare i valideringen.
Använd den högsta kontinuerliga strömmen som produkten realistiskt kan hålla, och bredda den för de vardagliga verkligheterna som ingenjörer ibland önskar var mindre: tolerans, kalibrerings-offsets, kontrollslupsfel och variations i strömtillförsel.
Utvärdera också driftslägen med hög ström över längre tid, eftersom upprepade strömbelastningar som varar i flera sekunder kan bidra till uppvärmning på ett sätt som påminner om kontinuerlig drift snarare än en kort transient händelse.
I många konstruktioner är den hårda kombinationen inte ett enda databladsartikel; det är hög belastning plus varm höljesluft plus minskat luftflöde plus närstående värmekällor.
För pulserade, avbrutna, tvåvägs- eller regenerativa strömmar, beräkna uppvärmning från RMS-ström: P = IRMS²R.
Toppspänning kan verka mycket hög i mätplots, men långsiktig uppvärmning bestäms huvudsakligen av RMS-ström (IRMS) över tid.
Ett upprepningsbart felmönster visar sig när validering fokuserar på topgränser medan en hög arbetscykel tyst producerar nästan kontinuerlig uppvärmning.
Använd det värsta motståndsvärdet när du skattar den övre gränsen för effekt. Börja med tolerans, inkludera sedan motståndsförflyttningen driven av shuntens TCR när dess kroppstemperatur stiger.
Även när effekten ligger under namnskyltens klassificering kan självuppvärmning fortfarande förvränga mätningen genom: (a) motståndsdrift, och (b) termiska gradienter som läcker in i sensor-routing och terminer.
En konservativ antagande som ofta sparar tid är att shuntens kropp körs varmare än en närliggande boardsensor rapporterar, särskilt när shunten ligger nära andra varma komponenter.
Översätt Watt till temperaturhöjning och materialstress
Ett effektvärde i sig är endast en del av berättelsen; samma dissipation kan vara tråkig på ett brett kopparutbud och problematisk i en tät layout inuti en förseglad låda.
Den praktiska frågan blir: vilken temperatur når shunt-elementet och terminalerna vid hög omgivning, svagt luftflöde och närliggande värmekällor, och hur reproducerbar är den resultaten över enheter?
Datablad anger vanligtvis en nominell effekt vid en referens omgivning (ofta 70°C) och minskar sedan tillåten effekt över den punkten.
Kontrollera var den faktiska höljes "omgivningen" landar under drift, eftersom höljesluft rutinemässigt stiger väl över rumstemperatur och kan variera dramatiskt med placering.
Nära värmebidragande faktorer att ta hänsyn till inkluderar: batterier; induktorer; effekt MOSFETs; likriktare; heta regulatorer.
För ytmonterade shuntar bär PCB-koppar ofta bort mestadels av värmen. Temperaturhöjningen kan svänga avsevärt med kopparområde, koppartjocklek, plan koppling och termiska via-densitet.
Sen routingändringar som skär bort koppar för bekvämlighet tenderar att producera heta punkter och drifter som ingen hoppades spendera tidsschema på.
Ett arbetsflöde som tenderar att kännas lugnare under uppstart är att reservera generös koppar tidigt och slappna av det först efter att mätningar visar att det termiska beteendet förblir välbeteendet.
Att arbeta under en graderad effektbrygga undviker omedelbar skada, men det lovar inte stabil mätning. Många produkter försämras mjukt först: motståndet kryper uppåt, kalibreringen skiftar och skyddströsklarna vaggar.
Ur ett tillförlitlighetsperspektiv går val av shunt ofta smidigare när det ramas in kring noggrannhetsbevarande och driftbeteende, där wattage behandlas som en ingång snarare än hela beslutet. Denna inramning minskar frustrationen med en design som klarar ett snabbt funktionstest men senare kämpar i soak, repetitionskontroller eller fältåldrande.
Definiera marginal med ett klart temperatur- och driftmål
En vanlig tumregel är 2× kontinuerlig effektemarginal, men en mer försvarbar metod kopplar marginalen till tillåten temperaturökning och tillåten drift.
Om livslängdsnoggrannhet är ett designmål, välj shunten så att temperaturökningen vid jämviktsläge förblir blygsam vid maximal hållbar belastning, snarare än att sväva nära den branta delen av nedbrytningskurvan.
Detta val minskar också lödfogarnas påfrestning från cyklisk uppvärmning, vilket är en av de problem som kan kännas bra tills det plötsligt blir en svår phase av avlusning.
För överbelastning och korta händelser, använd energi- och termiska cyklingstänkande
Korta pulser kan överskrida en kontinuerlig bedömning utan omedelbart fel, men lämnar ändå kvar en permanent motståndsförskjutning.
För motorstart, inrush eller batterifelströmmar, utvärdera pulsbelastning med energi: E = ∫ I²R dt.
När datablad tillhandahåller puls/överbelastningsdiagram, använd dem med den faktiska pulsbredden och arbetscykeln. När diagram saknas eller är vaga, behandla repetitiva pulser som ett termiskt cyklingscenario snarare än en enkelhändelse-akrobatik.
En shunt kan tolerera en enda fel puls och fortfarande åldras under upprepad belastning. Upprepning tenderar att visa sig som långsam avvikelse drift, intermittenta avläsningar från lödfatigue eller subtil padmissfärgning.
Accelererade cyklingtester som körs tidigt kan ta bort mycket osäkerhet senare, och de ger ofta emotionell avkastning också, med färre mysterier som endast ibland misslyckas under systemvalidering.
Validera med hög-belastning termisk testning och raka hälsokontroller
Beräkningar snävar ner kandidater, sedan exponeras bänktesting för vad kammaren, luftflödet och layouten egentligen gör. Kör vid maximal realistisk belastning tills temperaturerna stabiliseras, upprepa över temperaturn för att jämföra pre- och post-test motstånd och mätbar stabilitet efter avkylning.
Följ dessa hälsoparametrar under och efter testkörningar:
• Offset-drift som tenderar att öka vid fast ström över tid.
• Lödfogar som körs märkbart varmare än resistorkroppen eller terminalerna.
• Kortet blir brunt eller flussrester mörknar nära pads.
• Intermittenta avläsningar under knackning, vibration eller termisk cykling.
Felbeteenden som detta arbetsflöde syftar till att undvika
Riskerna ökar när shunten närmar sig sin termiska tak, och fel signaturen faller vanligtvis inom några igenkännliga kategorier:
• Motståndsdrift som direkt omvandlas till mätfel.
• Lödfatigue och padskador från termisk cykling som ger intermittenta eller bullriga avläsningar.
• Överhettning som leder till öppna/kort händelser, avaktiverar skyddsfunktioner eller utlöser sekundär skada någon annanstans.
En solid dissipationsöversyn slutar med visad marginal i temperaturökning och driftbeteende, snarare än att stanna vid en wattberäkning.
Materialval och Shunt-byggstrategi
Shuntens noggrannhet spårar vanligtvis tillbaka till två breda teman: hur motståndet beter sig när delen värms upp, och hur väl mätarrangemanget håller parasiter från att smita in i mätningen. I praktiken hjälper det att behandla shunten som mer än en resistorsymbol på ett schema; den beter sig som en liten termisk struktur med mekaniska gränssnitt och koppargeometri som tyst kan styra siffrorna.
Dominanta felkällor: temperaturökning; anslutnings-/kontaktmotstånd; layoutdriven induktans.
När ett designerteam känner sig överraskade av en driftande strömavläsning, beror det sällan på att Ohms lag har slutat fungera. Det beror oftare på att den termiska och fysiska genomförandet lagt till beteenden som var lätta att avfärda under schemarecensionen, och sedan svåra att ignorera på bänken.
Materialval
Ett praktiskt urvalsmål är en låg temperaturkoefficient för motstånd (TCR). Legeringar som manganin och konstantan används ofta eftersom deras motstånd förskjuts endast något när temperaturen ökar. Det beteendet passar verkligheten att en shunt är avsedd att avge kraft, ibland kontinuerligt, och även blygsamma watt kan flytta temperaturen tillräckligt för att påverka avläsningen.
Det hjälper också att planera för "självvärme" som ett normalt driftläge snarare än som ett undantag. Om legeringens TCR är högre, förändras motståndet under en konstant belastning, och den uppmätta strömmen kan verka fluktuera även när den verkliga strömmen är konstant. Sådan långsam drivning kan vara särskilt irriterande under validering eftersom det ser ut som instrumenteringsproblem tills den termiska berättelsen blir uppenbar.
Vanliga felaktiga diagnoser för långsam strömkröp efter en belastningssteg: ADC-brus; förstärker-offset; kalibreringsfel.
I en typisk bänksetup är det rutin att se den visade strömmen krypa i flera sekunder efter en stegförändring, för att sedan lugna ner sig när shunten och dess kopparkontakter slutligen stabiliserar sig i termisk jämvikt. Att se det beteendet för första gången kan kännas som ett spöklikt problem, men det försvinner ofta när temperaturhöjning och värmeflöde behandlas som designbegränsningar av första klass.
Uppvärmning handlar inte bara om den genomsnittliga temperaturhöjningen; gradienter över shuntkroppen och dess anslutningar kan förvränga reproducerbarhet. På kompakta kretskort kan ena änden av shunten avge värme till en stor koppardel eller fånga luftflöde, medan den andra änden förblir relativt varm. Den ojämna temperaturfördelningen kan översättas till subtila förändringar i motstånd och i de lokala EMF:erna och kontaktbeteenden som sensorkablarna försöker ignorera.
För att få resultaten att kännas mindre känsliga över olika konstruktioner lönar det sig vanligtvis att sprida värmen på ett förutsägbart sätt:
• Tillhandahåll tillräcklig koppar tvärsnitt för strömföring och värmespridning.
• Undvik monteringsdetaljer (distans, klämmor, höljesribbor) som kyler ena sidan mer än den andra.
• Håll den termiska miljön runt båda ändarna av shunten så symmetrisk som den mekaniska designen tillåter.
Även en legering med mycket låg TCR har begränsningar. Om driftpunkten driver stora temperaturavvikelser, eftersom shunten är underskalad, luftflödet är inkonsekvent, eller värmesänkan är svag, är vissa drifter och lång stabilisering efter belastningsändringar helt enkelt vad fysiken producerar. Att designa så att shunten körs "mindre varm än den skulle kunna" ger ofta lugnare siffror och färre huvudbryande debug-sessioner.
Konstruktion
Att välja en bra legering avslutar sällan jobbet. Konstruktion och anslutningsdetaljer dominerar ofta eftersom shunt-signalen vanligtvis ligger inom millivolt-området, där små parasitiska effekter börjar konkurrera med den mätning som görs.
I det där millivoltområdet krävs det inte mycket för att extra seriemotstånd ska spela roll: lödflikar, vias, kontaktpunkter och koppar övergångar kan alla lägga till nedgångar som ser ut som verklig shunt-spänning om inte mätningen arrangeras noggrant. Detta är ett av de områden där ingenjörer kan känna sig självförtroende när de tittar på ett schema, och sedan känna sig mindre nöjda efter montering, eftersom schemat utesluter den fysiska strömvägen som PCB:n och kontakterna skapar.
En fyrterminal (Kelvin) shunt, eller åtminstone ett fotavtryck som separerar ström- och sensförbindelser, ger vanligtvis mer pålitliga resultat än en tvåterminalupphämtning. Avsikten är enkel: mäta spänningen över det resistiva elementet självt, inte över lederna och kopparn som används för att föra belastningsströmmen.
Vid hög ström kan även bråkdelar av en milliohm i seriemotstånd skapa millivolter av extra nedgång. När den extra nedgången hamnar i mätslingan kan den landa i samma område som den avsedda shunt-signalen och förvränga den infererade strömmen. Många konstruktioner som ser bra ut på papper visar sig ha höga värden eller drifta för att den fysiska implementationen av misstag inkluderade dolda motstånd i den uppmätta regionen.
Kelvin-mätning levererar vad den lovar endast när sensledarna ansluter till de avsedda elektriska gränserna. Sensorplattor fungerar bäst när de direkt plockar spänning vid kanterna av det resistiva elementet, inte någonstans längs högströmskoppar som också bär belastningsström och dess associerade IR-nedgång.
Layoutvanor som tenderar att minska otrevliga överraskningar:
• Placera Kelvin-sensade kontakter nära gränserna för det resistiva elementet.
• Routa sensledarna som ett tätt differentialspar.
• Håll sensparet borta från switching-noder och bullriga strömförsörjningsloopar.
• Återför sensparet direkt till förstärkarens ingångar utan att dela högströmssegment.
Att behandla sensparet som en instrumenteringssignal istället för bara ett annat nätverk leder ofta till stabilare mätningar över produktionsvariationer, omarbetningar och åldrande av kontakter. Den stabiliteten är svår att överskatta under sen debug, när tidspressen gör att varje tvetydig millivolt känns personlig.
Dynamiska belastningar: Induktans som den tysta extra spänningstermen
Med dynamisk ström blir induktans ofta den dominerande källan till mätfel. Den uppmätta shuntspänningen är inte rent I × Rshunt. När strömmen förändras snabbt, läggs en induktiv term, Vinduktiv = L(di/dt), till eller subtraheras från den resistiva nedgången. I snabbswitchande kraftelektronik kan den induktiva bidraget överstiga det resistiva bidraget under switchingkanterna, vilket kan göra omedelbara mätningar felaktiga även när mätkretsen fungerar exakt som den är byggd.
En implication som överraskar team är: en shuntarrangemang kan se korrekt ut vid DC och sedan se inkorrekt ut i en PWM-miljö. I många fall rapporterar kretsen helt enkelt fysiken i strömbanan, inklusive dess parasitiska induktans, istället för att göra ett beräkningsfel.
Lågutökt shunts minskar slingområdet genom breda, platta strömbanor och symmetrisk geometri. Den konstruktionen minskar parasitisk induktans och sänker magnituden av di/dt artefakter. I praktiska byggen flyttar några geometriska val konsekvent nålen mot upprepbarhet:
• Symmetrisk strömingång och utgång runt det resistiva elementet.
• Korta, direkta strömbanor med minimal slingarea.
• Breda ledarkorssnitt som undviker smala nedskärningar nära shunten.
När PWM-kanter är snabba gör dessa fysiska val ofta mer för mätstabilitet än små justeringar i nominellt resistansvärde, och det kan kännas kontraintuitivt tills första gången en layoutändring fixar vad som såg ut som ett analogt front-end problem.
När (di/dt) är hög, minskar placeringen av sensorförstärkaren nära Kelvinpunkterna plockup och undviker att förlänga sensorloopområdet. Tajt differentialrouting hjälper av samma anledning. Filtrering blir sedan ett medvetet val snarare än en eftertanke, eftersom switchingkanter kan aliasa in i mätbandbredden och skapa mätningar som ser bullriga, hoppande eller missvisande ut.
Mätobjektalternativ (välj tidigt, eftersom det påverkar layout- och analogbeslut i olika riktningar): genomsnittlig ström för energövervakning, begränsa bandbredd så att kanterna dämpas och skärmen stabiliseras; topp/transientström för skydd, håll bandbredden högre medan man betonar låg induktans och noggrann layout för att minska falska trippar.
I dagliga ingenjörstermer känns designen jämnare när teamet enas tidigt om huruvida de vill ha elektriskt snabb ströminformation eller energiskt exakt ströminformation. Dessa två mål kan båda vara giltiga, men de trivs sällan under samma shuntgeometri, förstärkarbandbredd och filtreringsstrategi.
Mekaniska och Säkerhetsfaktorer

Mekanisk utförande avgör om teoretisk prestanda håller när produkten utsätts för värme, vibrationer, hantering och tid. Elektrisk noggrannhet kan optimeras i scheman och kalkylblad, men verklig stabilitet och säker beteende tenderar att avgöras av mekaniska och termiska verkligheter som ibland är lätta att underskatta tills en prototyp börjar "agera annorlunda" på bänken.
Termisk hantering och värmedriven mätfel
Högströms shunts omvandlar små spänningsfall till värme, och den värmen behöver en upprepbar väg för att sprida och lämna systemet. En inkonsekvent termisk väg kan orsaka mätvariation och drift. Dessa effekter blir ofta mest märkbara under belastningsförändringar, förändringar i inneslutningstemperatur och systemuppvärmningsperioder.
En shunt kan se elektriskt korrekt ut i isolering och ändå drifta när den är inbäddad i en för liten eller besvärlig kopparstruktur. I praktiken blir den omgivande kopparen en del av shuntens termiska miljö och en del av strömfördelningsnätverket.
Vanliga bidragsgivare till oväntad uppvärmning är vanligtvis mundana, vilket är varför de smyger sig igenom revisioner: en enda smal sektion, en via-flaskhals eller en lagerövergång som koncentrerar strömtäthet.
Rekommenderade layout taktiker:
• Breda, tjocka kopparflöden på högströmssegment
• Korta, direkta strömbanor med minimal nedskärning
• Flera vias för lagerövergångar för att fördela både ström och värme
• Sensorupptagningspunkter placerade för att undvika parasitisk resistans i högströmskoppar
När kort kommer tillbaka från labbet med mysterieliknande drift spåras det ofta till en förbiseende begränsning som blir den verkliga värmaren, som trycker shuntens temperatur precis tillräckligt för att påverka mätningar under verklig belastning.
Om luftflödet är tillfälligt snarare än definierat kan shuntens temperatur ändras med inneslutningens orientering, fläktvariation eller hur tätt kablar är dragna nära kortet. Den typen av variabilitet kan vara frustrerande eftersom den skapar kalibreringsbeteende som känns lynnigt från en uppsättning till en annan, även när inget uppenbart har förändrats elektriskt.
En liten kylfläns, en kontrollerad luftflödeskanal eller en avsiktlig termisk kontaktstrategi kan göra temperaturprofilen repetitiv. Repetitivitet tenderar att vara mer värdefullt än att jaga den lägsta möjliga temperaturen eftersom kalibrering och kontrollbeteende gynnas av konsistens.
Situationen där topptemperatur spelar större roll än genomsnittet:
• Motorstyrningar med PWM belastningsdynamik
• Solenoid eller aktuatorpulsering
• Inrush-händelser och snabba strömtoppar
• Arbetscyklad industriell belastning
Att designa enbart utifrån stadigvarande termiska siffror kan producera intermittenta avvikelser under arbetscykelövergångar, vilket ofta är när kontrollslussar är som mest känsliga och när "nästan korrekta" avläsningar blir operationellt obekväma.
Temperaturgradienter över olikartade metaller kan skapa mikrovågsnivå-offsets, och dessa offsets slutar vara akademiska när det intressanta signalnivån är endast tiotals millivolts. Layoutsymmetri är inte estetisk här; det är en mätmetod som minskar termisk EMF-obalans.
Praktiska symmetri vanor:
• Dra sensorbanor som ett matchat par med liknande längd och geometri
• Håll kopparmassa och termisk exponering liknande på båda sensorvägarna
• Undvik att placera en sensorledning nära lokala värmekällor medan den andra förblir i en kallare region
Värmekällor som vanligtvis snedvrider ena sidan av ett sense-par:
• MOSFETs
• Spolar
• Rektifierare och dioder
• Högdissipationsregulatorer
Ett mönster som upprepade gånger dyker upp under felsökning är den offset som ingen kan förklara ofta korrelerar med kortladdningars temperaturökningar och försvinner när sensorledningen och termisk exponering görs mer balanserade.
Tolerans, Stabilitet och Spänningsstress
Inledande tolerans påverkar startpunkten, men långsiktig noggrannhet formas oftare av hur motstånd förändras med temperatur, effektitet och mekaniska begränsningar som subtilt förändrar den termiska profilen över månader eller år. Shunten glider sällan ensam; den omgivande strukturen och processdetaljer styr ofta utfallet.
En trång toleransshunt kan minska den initiala vinsten spridning, men systemvinsten återspeglar fortfarande hela signalkedjan. Det är vanligt att se produktionsvariation som drivs mindre av det nominella shuntvärdet och mer av konsekventa, små monteringsskillnader som läggs ihop.
Systemnivåbidragare till vinstfel:
• Förstärkarens ingångsoffset och bias strömmar
• ADC-referensdrift och temperaturbeteende
• Motstånd som läggs till av sensorvägsdragning och anslutningar
• Kontaktmotstånd vid kontakter eller bussgränssnitt
• Variation i koppartjocklek och platningsskillnader
• Löddovolym och filletgeometri runt terminalerna
Fotavtrycksdesign och placering av sensorupphämtning kan justeras för att minska känslighet för lödfilletter och kontaktgeometri. Detta tillvägagångssätt ger ofta mer förutsägbart parti-till-parti beteende än att helt enkelt specificera en stramare nominell shunt-tolerans och hoppades att resten av stapeln beter sig idealiskt.
Lågt TCR begränsar motståndsrörelsen med temperatur, och en låg effektkoefficient minskar motståndsrörelsen med applicerad effekttäthet. Det obekväma är att självuppvärmning är lastformad, inte konstant, så avvikelser kan bli lastberoende, effektivt en tyst icke-linjäritet som kontrollalgoritmer kanske inte förutser.
Villkor som ofta avslöjar lastberoende avvikelser:
• Bred dynamisk verksamhet
• Upprepade pulserande laster
• Sluten loopkontroll som antar linjär strömåterkoppling
En hållbar strategi är att behandla shunten som termiskt aktiv och minska temperaturökningen per ampere genom att använda kopparutjämning, förutsägbar luftflöde och disciplinerat komponentplacering, snarare än att enbart förlita sig på en databladförbättring som kanske inte översätts när korttidsmåttet dominerar.
Även om shuntfallet är litet kan elementet och dess terminaler sitta vid hög gemensam modepotential. Det betyder att arbetspänningsgränser, isoleringssystemets beteende och kretsnivås gånget/tålighets måste utvärderas på systemnivå, inte härledas från millivolt mäta.
Designkontroller att köra explicit:
• Maximalt arbetsspänning över elementet och paketets isoleringssystem
• Gångavstånd och klarhet per tillämplig standard och föroreningsgrad
• Kortets renhet och rester som kan minska effektivt gångavstånd
• Fysisk placering relativt kontaminationskällor och ledande skräpsvägar
Föroreningsfaktorer som tenderar att överraska team senare:
• Dammackumulering i luftflödesvägar
• Kondensation under lagring eller transport
• Flussrester och ojämnt rengöringstäckning
När läckagefel verkar slumpmässiga i fältet är den grundläggande orsaken ofta en förutsägbar kombination av placering, rester och miljö som endast blir uppenbar efter att ha korrelerat returer med tillverkningsprocessens detaljer.
Hållbarhet under verklig mekanisk stress
Shuntar används ofta där värme, vibration och upprepad strömcykling samexisterar. Det är klokt att anta att monteringen kommer att utsättas för flex, chock och termisk expansionsmissmatch, även om produkten marknadsförs som stationär, eftersom frakt, installation och service fortfarande ålägger mekaniska händelser.
Avslutningsfinish och skyddande beläggningar bör matcha den förväntade atmosfären. Korrosion misslyckas inte alltid dramatiskt; det kan tyst införa ändringar på milliohm-nivå som skuffar kalibreringen över tid, vilket kan vara djupt irriterande eftersom mjukvarufilter kan göra avvikelsen mindre uppenbar utan att faktiskt ta bort felet.
Miljöer som accelererar korrosionsmekanismer:
• Industriella avgaser och kemikalieexponering
• Vägsalt och kustsaltluft
• Hög luftfuktighet och frekventa kondensationscykler
Stora shuntar kan bete sig som styva ankare. Under termiska cykler kan den styvheten belasta lödanslutningar, särskilt nära kortsidor, skruvpunkter eller områden som flexar under montering. Fel visar sig ofta där massa och vibration möts, inte nödvändigtvis där strömtätheten är högst.
Mekaniska tillförlitlighetsåtgärder:
• Lägg till mekaniskt stöd där det passar monteringskonceptet
• Följ den rekommenderade landmönstret för att kontrollera fuktighetsområdet och fillets formen
• Undvik att spänna över PCB-regioner som böjer sig under installation eller åtdragning
• Håll högmassade delar borta från kända flexpunkter när det finns layoutfrihet
Fältreturer förstärker ofta en enkel verklighet: sprickor tenderar att bildas där stress koncentreras, och stress koncentreras där styvheten förändras plötsligt.
För tuffa miljöer gynnar komponentval cykling och vibrationsprestandadata som återspeglar verkliga kvalificeringsmetoder. Milderingar som staking eller underfyllning kan hjälpa i vissa konstruktioner, men de kan också skapa nya termiska eller stressproblem om de tillämpas utan att bekräfta biverkningar.
Angreppssätt som ofta utvärderas tillsammans:
• Komponenter med validerad termisk cykel- och vibrationsdata
• Underfyllning eller staking efter att ha bekräftat att värme inte är instängd
• Mekaniska begränsningar som undviker att skapa nya stressökningar
Testplaneringsdetaljer som minskar falsk trygghet:
• Temperaturcykling med strömförbrukning, inte bara utan strömcykling
• Mätning av avvikelse under driftscykelövergångar
• Inspektion för lödkröp och mikrosprickor efter cykling
Obevakade termiska tester kan se rena ut samtidigt som de missar strömkoefficientrelaterade avvikelser och lasformade mekaniska effekter som endast framträder när ström faktiskt flödar.
Säkerhet, efterlevnad och skyddande beteende
Säkerhet formas av vad systemet gör när något går fel, inte bara av komponentens tryckta klassificering. En strömsensorkedja som beter sig förutsägbart under felvillkor tenderar att producera lugnare resultat i fältet och tydligare diagnoser under service.
Delar med erkända säkerhetscertifikat kan minska efterlevnadsoch osäkerhet och vanligtvis förbättra spårbarheten. Ändå är certifiering inte genvägen till systemverifiering eftersom krypning, avstånd och termiska förhållanden är egenskaper hos den monterade produkten och dess layoutval.
Efterlevnad och verifieringspunkter som förblir systemägd:
• Kortnivå krypning och clearance
• Termisk stigning i den verkliga kapslingen och luftflödesförhållandet
• Avstånd kring föroreningar och rester
• Tillverkningskontroller som bevarar antagen renhet och avstånd
Anta att shunten kan misslyckas öppet, driva uppåt eller utveckla intermittenta anslutningar. I en kontrollslinga kan en öppen shunt felaktigt uppfattas som ingen ström, vilket kan få systemet att begära mer drivkraft och skapa okontrollerat beteende.
Felbeteenden värt att planera för:
• Öppen krets shunt eller bortkopplad avslutning
• Gradvis resistansförändring som snedvrider strömavläsningar
• Intermittent kontakt under vibration eller termisk expansion
• Sensorkablage skada eller ADC-ingångsanomalier
Detektions- och mildringsmönster som vanligtvis används:
• Plausibilitetskontroller som jämför kommenderad vs. uppmätt respons
• ADC-mättnad övervakning och områdeskontroller
• Timeout-baserad felinlåsning för instabila avläsningar
• Definierat avlastningsbeteende när sensorik blir opålitlig
System som övergår till ett förutsägbart avlastat tillstånd under sensorfel är generellt lättare att validera och lättare att lita på än system som försöker fortsätta fungera på otydliga feedback.
Tillhandahåll testpunkter eller inbyggda diagnostikverktyg så att fel kan isoleras utan riskabel provning nära högströms- eller högspänningsnoder. Serviceteam tenderar att röra sig snabbare när designen erbjuder en tydlig metod för att bekräfta om känslokedjan är intakt, och den hastigheten minskar ofta sekundära skador från upprepade försök och felarbeten.
Servicetillgängliga designbestämmelser:
• Tillgängliga testpunkter för känslospänning och referenskontroller
• Inbyggda självteståk eller kalibreringslästningar där det är genomförbart
• Tydliga isoleringssteg som separerar sensorfel från lastfel
• Dokumentation som kopplar uppmätta noder till förväntade värden under säkra förhållanden
Mekaniska och säkerhetsfaktorer är den praktiska vägen genom vilken noggrannhet, stabilitet och säkert beteende kvarstår över tid. Mer pålitliga strömsensordesigner behandlar shunten som en termisk-mekanisk komponent först och en ideal resistor sekundärt, och anpassar sedan layoutsymmetri, isoleringsdisciplin, föroreningskontroll och fail-safe-logik kring den verkliga driftkontexten.
Beräknings exempel
Shuntbaserad strömsensorik ser ren ut på papper, och ekvationerna orsakar sällan problem av sig själva. Vad som tenderar att överraska folk senare är hur snabbt ett korrekt elektriskt värde kan se annorlunda ut när temperaturökning, monteringsstress, kopparresistans och kontaktbeteende kommer in i bilden. I den dagliga designarbetet är det mest tillfredsställande shultvalet vanligtvis det som förblir förutsägbart över värme, monteringsvariation och ledningsparasit medan det fortfarande producerar en signal som den analoga fronten kan läsa utan dramatik.
Anta en 100 mA fullskala ström och en 50 mV mål känslospänning. Den spänningsnivån känns vanligtvis bekväm eftersom den ligger över vanliga offset- och brusnivåer, så systemet tvingas inte jaga efter upplösning.
Elektrisk uppsättning och beräkning:
• Resistans: R = 0.05 / 0.1 = 0.5 Ω
• Fullskala shuntförlust: P = I² × R = 0.1² × 0.5 = 0.005 W
5 mW verkar nästan för litet att bry sig om, ändå är det svårt att ignorera hur ofta riktig hårdvara blir varmare än vad den tidiga kalkylbladet antog. Att välja en större effektnivå (till exempel 0.25 W) känns ofta konservativt på ett bra sätt: det sänker temperaturökningen, minskar resistansdrift och ger andrum när systemet inte beter sig optimalt.
Scenarier som ofta sträcker den godartade effektheten: varma omslag, närliggande värmekällor, minskad konvektion, förlängd felström på grund av firmware- eller lastproblem.
Vid denna strömnivå är självuppvärmning vanligtvis inte den dominerande felkällan, och den verkligheten kan vara konstigt lugnande: shunten kan vara bra medan fronten tyst sätter noggrannhetsgränsen.
En 50 mV fullskalsignal är vanligtvis lätt att förstärka, men designförtroendet förbättras när förstärkarens ingångsoffset och drift förblir långt under millivoltintervall över temperatur. Det hjälper också när det utgångsanslutna bruset efter förstärkning inte suddar ut de minsta stegen du bryr dig om. En vanlig frustration under granskningssessioner är att se en noggrant utvald shunt paired med en förstärkare vars offsetdrift över temperatur visar sig vara den största bidragande faktorn i felbudgeten.
Även vid låg ström kan jordfel skapa fel som är pinsamt mycket större än den shuntminskning du avsåg att mäta. Tätt, parat routande för känslolinjena och en ren referensstrategi hjälper till att undvika offset som endast uppträder när andra delsystem byter tillstånd.
Typiska layoutpraxis som minskar mystiska avläsningar: Kelvin-sensorrouting till shuntkomponenten, tätt differentialrouting, kontrollerade återvändsvägar, separation från hög di/dt-loopar.
Anta 50 A fullskala och en 75 mV mål känslospänning. Avsikten här är bekant: håll effektförlusten rimlig samtidigt som du fortfarande levererar en känslosignal som håller i en bullrig miljö.
Elektrisk uppsättning och beräkning:
• Resistans: R = 0.075 / 50 = 0.0015 Ω
• Fullskala shuntförlust: P = 50² × 0.0015 = 3.75 W
En del som är märkt med 5 W kan vara ett rimligt startfilter, men etiketten berättar sällan hela historien. I verkliga byggen beror temperaturökningen starkt på hur shunten är monterad och kyld, och dessa detaljer kan dominera resultatet även när de elektriska beräkningarna är felfria.
Praktiska influenser som ofta överväger katalognumret: kopparområde och tjocklek, luftflöde, monteringsgränssnitt, närhet till heta komponenter, omslagsvärme.
Vid 50 A faller spänningen från anslutningar och koppar kan hamna i samma område som 75 mV, vilket är exakt där mätargumenten börjar. Om känselslingorna inte tas direkt från shunt-elementet (Kelvin-anslutningar), kommer mätningen att inkludera lednings- och kontaktmotstånd som kan förändras med anslutningens åldrande, oxidation och temperatur. Detta är en vanlig anledning till att två enheter som såg identiska ut på bänken slutar med att inte överensstämma efter installation.
Självuppvärmning skiftar motståndet enligt shuntens TCR, och det skiftet visar sig som vinstfel. Designen tenderar att kännas mer under kontroll när termiskt beteende behandlas som en del av mätöverföringsfunktionen, inte som en eftertanke.
Föremål som vanligtvis ingår i en realistisk termisk/felkontroll: worst-case kontinuerlig ström, realistisk felvaraktighet, varm omgivning, temperaturhöjning i hölje, PCB-kopparspridningsmotstånd, anslutningsuppvärmning.
Högströms-transienter kan avslöja induktans och mekanisk instabilitet på sätt som är svåra att jämna ut i firmware. Låg-induktans elementstilar (ofta metall-elementkonstruktioner) minskar mätartefakter under snabba strömsteg. Mekanisk stress förtjänar också respekt: bultvridning, PCB-böjning och termisk cykling kan flytta motstånd med små mängder som blir synliga på milliohm-nivåer.
Mekaniska/strukturella bidrag som ingenjörer ofta slutar med att spåra: vridmomentvariation, tvättsandstapel, krypning över tid, termisk utvidgningsskillnad, vibration.
Anta ett batterisystem med 10 A fullskala och en 100 mV målspänningskänsla. Beräkningarna är enkla, men fältbeteende är ofta inte det, särskilt när laddning och urladdning sker i varma utrymmen.
Elektrisk uppsättning och beräkning:
• Motstånd: R = 0.1 / 10 = 0.01 Ω
• Fullskala shunt-dissipation: P = 10² × 0.01 = 1 W
En 2 W (eller högre) komponent minskar vanligtvis temperaturhöjningen och förbättrar stabiliteten, vilket stämmer överens med vad många team lär sig efter den första omgången av fältdatadata: drift tenderar att visa sig när självvärme och höljes temperatur staplas ihop. Resultaten från rumstemperaturbänken kan vara genuint utmärkta och ändå misslyckas med att förutsäga beteende vid förhöjd omgivning.
Villkor som ofta avslöjar drift: långvarig laddning/urladdning, varm-nedsänkta höljen, begränsad luftström, angränsande kraftomvandlare som värmer upp kretskortet.
Högre känslospänning förbättrar signal-till-brus-förhållandet och underlättar förstärkarens krav, men det ökar effektförlust och lokal uppvärmning. Lägre känslospänning minskar dissipation, men det lägger mer börda på förstärkar-offset, brus och layout-exekvering. Många robusta designer slutar med att föredra en måttlig känslospänning och sedan lägger verklig ansträngning på termisk hantering, eftersom långsiktigt beteende ofta är mer förutsägbart än att jaga minimala förluster.
Handelsaxlar som vanligtvis utvärderas tillsammans: SNR marginal, förstärkar offset/drift-huvudutrymme, tillåten dissipation, temperaturhöjning, mekaniska förpackningsrestriktioner.
Shuntvalet tenderar att gå smidigt när de elektriska målen och de fysiska verkligheterna behandlas som ett kopplat problem. Följande sekvens är tillräckligt enkel för att upprepas, men detaljerad nog för att fånga de problem som vanligtvis dyker upp sent.
Beräkna elektriska mål först:
• Beräkna shuntmotstånd från den önskade känslospänningen: R = Vsense / IFS
• Beräkna dissipation med worst-case ström: P = IMAX² × R
När IMAX definieras, är det hjälpligt att inkludera transienter och felaktighetsfall som kan pågå längre än första intuitionen antyder.
Delar med låg TCR, låg induktans och välbeskrivet driftbeteende leder vanligtvis till lugnare avloppscykler. Konstruktion som stödjer Kelvin-mätning, stabila anslutningar och återkommande montering ger vanligtvis avkastning i enhet-till-enhet konsistens.
Delkarakteristik som ofta grupperas tillsammans under urval: TCR, långsiktig drift-specifikation, pulshanteringsnoter, induktans, terminalstil, rekommenderat landmönster, Kelvin-funktionalitet.
Mät eller modellera shuntens temperaturhöjning i den verkliga montering vid varm omgivning, med den avsedda monteringsmetoden och koppargeometrin. Det här steget tenderar att avslöja drivrutiner som ingenjörer önskar var mindre: luftflödesantaganden, värmesänkning, uppvärmning av anslutningar och kopparspridningsmotstånd.
En stadig designsynpunkt är att shuntmätning är en elektrisk mätning som lever inom ett termiskt och mekaniskt system. Designer som erkänner detta koppling tenderar vanligtvis att ge avläsningar som förblir konsekventa över enheter, över temperatur och över tid.
Slutsats
Noggrann nuvarande mätning kräver mer än att välja en resistor som uppfyller en enkel beräkning. Shuntvärde, effektförlust, temperaturökning, tolerans, TCR, förstärkarens prestanda, ADC-beteende och PCB-layout bidrar alla till det slutgiltiga resultatet. Genom att balansera signalstyrka, effektivitet, termiska gränser och felkällor kan konstruktörer bygga strömavkänningssystem som förblir stabila, noggranna och pålitliga under verkliga driftsförhållanden.
Vanliga frågor [FAQ]
1. Varför skapar valet av en extremt låg shuntspänning ofta fler mätutmaningar än förväntat?
En mycket låg shuntspänning minskar effektförlust och förbättrar effektiviteten, men gör också mätningen mer sårbar för förstärkarens offset, temperaturdrift, ADC kvantiseringbullrande, termoelektriska spänningar och switchinginterferens. När signalen blir mindre konsumerar dessa felkällor en större procentandel av mätintervallet. Vad som verkar effektivt på papperet kan så småningom kräva ytterligare kalibrering, filtrering och layoutoptimering för att bibehålla stabila strömavläsningar över temperatur och driftsförhållanden.
2. Varför är valet av shuntresistor i grunden en avvägning mellan effektivitet och mätkonfidents?
Ökning av shuntmotstånd producerar en större känslospänning, vilket förbättrar signal-till-brusförhållandet och minskar trycket på förstärkaren och ADC. Men det ökar också effektförlust, temperaturökning och spänningsförlust som lasten ser. Att minska shuntmotståndet förbättrar effektiviteten och minimerar uppvärmningen, men ställer striktare krav på analog noggrannhet, PCB-layoutkvalitet och digital filtrering. Framgångsrika konstruktioner balanserar vanligtvis båda målen snarare än att optimera enbart för en.
3. Varför kan en strömavkänningskrets uppfattas som noggrann vid rumstemperatur men drifta betydligt efter uppvärmning?
Självvärme förändrar shuntmotståndet enligt dess temperaturkoefficient för motstånd (TCR). När ström flyter kontinuerligt värms shunten och den omgivande kopparn gradvis upp, vilket gör att det uppmätta värdet skiftar även om den faktiska strömmen förblir oförändrad. Extra värme från närliggande komponenter, temperaturökning i inkapslingen och variationer i luftflödet kan ytterligare förstärka denna effekt. Termiskt beteende blir ofta en stor bidragande faktor till långsiktig mätprecision.
4. Varför anses Kelvinavkänning vara avgörande för lågresistiva shuntmått?
När shuntvärden faller in i milliohm-området kan motstånd från PCB-spår, via, lodpunkter och kontakter bli jämförbara med shunten själv. Kelvinavkänning separerar den strömförande vägen från spänningsavkänningsvägen, vilket säkerställer att endast spänningen över det resistiva elementet mäts. Utan Kelvin-kopplingar kan parasitiskt motstånd introducera strömberoende fel som varierar mellan sammansättningar och förvärras över tid på grund av åldrande av kontakter eller mekanisk stress.
5. Varför bör effektnedbrytningsberäkningar baseras på RMS-ström istället för toppström i många applikationer?
Toppströmsvärden kan verka alarmerande under switching-händelser eller uppstartsövergångar, men långvarig uppvärmning bestäms främst av RMS-ström. RMS-ström återspeglar den genomsnittliga energi som levereras till resistorn över tid och påverkar därför direkt temperaturökningen. Konstruktioner som fokuserar endast på toppström kan underskatta termisk stress när högduty-cycle laster skapar nästan kontinuerliga uppvärmningsförhållanden.
Besläktad blogg
-
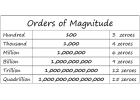
Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?
![Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?]()
2024/07/29
Miljoner representerar 106, en lätt greppbar siffra jämfört med vardagliga artiklar eller årslöner. Miljarder, motsvarande 109, börjar sträcka ... -
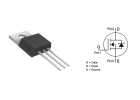
IRLZ44N MOSFET -datablad, krets, motsvarande, pinout
![IRLZ44N MOSFET -datablad, krets, motsvarande, pinout]()
2024/08/28
IRLZ44N är en allmänt använt N-kanals Power MOSFET.Det är känt för sina utmärkta växlingsfunktioner och passar mycket för många applikatione... -
Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?
![Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?]()
2024/10/6
Problem med avladdning av batteriladdning av mobiltelefoner är vanliga men kan hanteras effektivt.Temperaturen spelar en stor roll i batterieffektivi... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
BC547 -transistorn används vanligtvis i en mängd elektroniska applikationer, allt från grundläggande signalförstärkare till komplexa oscillatork... -
En komplett guide till multiplexerare och deras roll i digitala system
![En komplett guide till multiplexerare och deras roll i digitala system]()
2025/09/20
Multiplexerare är komponenter i digitala system, utformade för att kanalisera flera insignaler till en enda utgångslinje med binära logik och styr... -
Omfattande guide till SCR (kiselstyrd likriktare)
![Omfattande guide till SCR (kiselstyrd likriktare)]()
2024/04/22
Kiselstyrda likriktare (SCR) eller tyristorer spelar en viktig roll i kraftelektroniktekniken på grund av deras prestanda och tillförlitlighet.Den h... -
LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare
![LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare]()
2024/07/15
LR621- och SR621SW -knappbatterier är utbredda i kompakta elektroniska enheter som klockor, små leksaker, kalkylatorer och fjärrnycklar.Flera tillv... -
Grundläggande av op-amp kretsar
![Grundläggande av op-amp kretsar]()
2023/12/28
I den komplicerade elektronikvärlden leder en resa till dess mysterier alltid oss till ett kalejdoskop av kretskomponenter, både utsökta och komple... -
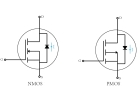
Jämförelse av NMO: er och PMOS -skillnader och applikationer
![Jämförelse av NMO: er och PMOS -skillnader och applikationer]()
2024/11/15
Att förstå skillnaderna mellan NMO: er och PMOS -transistorer är viktigt för att utforma effektiva kretsar.NMO: er (N-typ metall-oxid-halvledare) ... -
CR2450 vs CR2032 Jämförelse: allt du behöver veta
![CR2450 vs CR2032 Jämförelse: allt du behöver veta]()
2025/09/15
Knappbatterier som CR2450 och CR2032 driver många vardagliga elektronik, från klockor och fjärrkontroller till medicinska och industriella enheter....




Heta delar
- C1608X5R1A335K080AC
- ICS9P956AFLFT
- CX22702-25
- ISL6753AAZA
- S71PL127NBOHFW4U
- SC116009CLH
- MAX196BCAI+
- NCP3170ADR2G
- LT1763CS8-5#TRPBF
- NUC2401MNTAG
- ATF-541M4-TR1
- ZL50234QC
- C1005X8R2A332K050BB
- EPH1620KSHSU
- MPC9653AFAR2
- SB3H100-E3/54
- A6636SJS-P
- MC9S12D64MPV
- MT29F64G08AJABAWP-IT:B
- GRM31CR72J153KW03L
- C1005CH1H561J050BA
- CL10C120JB8NNNC
- BD6111FV-E2
- 2SCR512P5T100
- GRM0335C2A2R7CA01J
- NT71660FG-00003/G
- CBT3257APW
- XC4005E-3PQG160C
- AK4385ET-E2
- MC81F4315D-MSF29
- HMK105CG330JV-F
- IDT82P2281PF
- CC1808JKNPOEBN180
- CX06836-21Z
- 50051R
- VI-B6V-CU
- T491D336K016ZTAC00
- T491D226M016AH2478
- 215LCAAKA13FG
- STI7197-HUD
- XC2VP7-FF672CGB0813
- DB8500BAP
- PEX8747-CA80FBC
- BTS7010-2EPA
- PEB1760EV22
- S9S12DG25F0CPVER
- ESP32-WROOM-32U-N4
- 2N2034A
- LMR38020FDDAR
- HC32L130J8TA-LQ48