- Svenska
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Förklarad: Funktioner, Typer och Tillämpningar
Katalog

Utforska PMIC
En PMIC (Strömhantering Integrerad Krets) är en dedikerad IC som tar emot en eller flera ströminmatningar och producerar flera reglerade, kontrollerade strömledningar för de olika lasterna på en kretskort. Dessa laster inkluderar ofta processorer, minne, RF-sektioner, sensorer och olika perifera enheter.
Istället för att sprida diskreta regulatorer och övervaknings-IC över designen, konsoliderar en PMIC dem till en koordinerad strömdomänhanterare. För många team ger denna konsolidering också en viss trygghet under uppstart, eftersom det finns en plats att leta på när ledningar beter sig konstigt.
Processorer, minne, RF-block, sensorer och andra laster.
Funktionellt omfång
I verkliga produkter sträcker sig en PMIC:s bidrag långt bortom spänningskonvertering. Den praktiska fördelen visas när den beter sig som en systemnivå strömkoordinator som kopplar samman flera ansvarsområden som naturligt interagerar under boot, driftlaststeg och felvillkor.
Konvertering
En PMIC kan kombinera olika regulatorer så att effektivitetsfokuserade strömledningar och brus-känsliga strömledningar kan optimeras separat. I praktiska designer handlar huvudfrågan ofta inte om att generera den krävs spänningen, utan att upprätthålla en stabil spänning under lastförändringar, starthändelser och andra krävande driftförhållanden.
Buck-regulatorer, boost-regulatorer, buck-boost-regulatorer och LDO-regulatorer.
En ledning som ser ren ut vid en stabil last kan bli synligt stressad under verkliga profiler. Effektivitet, störningar, transient respons och termisk marginal undersöks vanligtvis noggrant när CPU-burst strömmar, RF-överföringspulser eller sensoravläsningsspikar testas under verkliga driftförhållanden.
CPU-burstar, RF-sändningspulser och sensoravläsningspik.
Distribution
Efter att ledningarna genererats dikterar en PMIC ofta hur de delas, växlas och isoleras. Detta är där en design kan kännas antingen robust eller ömtålig, särskilt under hot-plugg, brownout och kabelrelaterade händelser. När distributionen hanteras genomtänkt, kontrolleras ansträngningen, bakåtflödesvägar begränsas och en fel är mindre sannolikt att kaskaderar in i en kolaps över hela kretskortet.
Ledning möjliggörare, lastbrytare, strömbegränsning och ideal-diode ORing för multi-källa inmatningar.
Detektering och övervakning
De flesta PMIC:er integrerar övervakare som kontinuerligt övervakar ledningars hälsa och tillhandahåller signaler som firmware och hårdvara kan tolka. I ett laboratorium känns dessa funktioner snabbt inte bara som trevliga tillägg utan börjar kännas som skillnaden mellan en ren felsökning session och en dag som spenderas med att jaga en återställning som vägrar att reproduceras vid efterfrågan.
Undervoltage-monitorer, överspänningsmonitorer, överströmavkänning, termisk avkänning och ström-godkänning.
En lärdom som tenderar att stanna kvar hos erfarna uppstartsteam är att ström-godkänningströsklar och deglitch-timing måste vara entydiga. När de är vaga eller dåligt anpassade till systemet, resulterar det ofta i falska omstarter eller spökstartproblem som bara dyker upp vid temperaturhörn, på vissa batterier eller efter en sekvens av snabba omstarter.
Kontroll och sekvensering
En PMIC inkluderar ofta mekanismer för att forma hur räler stiger, faller och samordnar med varandra. Dessa detaljer visar sig som konkreta resultat: om ett system startar upp upprepade gånger, om komponenter utsätts för undvikbar stress och om kortet återgår till ett känt tillstånd efter ett fel.
Sekvensering, mjukstart, rampformning, urladdningsvägar och konfigurerbar inter-räls timing.
Ett digitalt system kräver vanligtvis inte bara korrekta stillastående spänningar; det förväntar sig också att dessa räler ska komma i en viss ordning och inom begränsade tidsrelationer. Om lutningarna är för branta, för långsamma eller helt enkelt felordnade kan interna strukturer och domäner hamna i odefinierade tillstånd som är besvärande intermittenta, särskilt runt SRAM-retentionsbeteende och uppstart av hög hastighetssnitt.
Interna ESD-strukturer, SRAM-retentionsdomäner och hög hastighetssnitt.
Vad som tenderar att forma resultat i verkliga designer
När ett team övergår från en blockdiagram till en fungerande prototyp, lyckas eller misslyckas PMIC-val och konfiguration ofta på operativa detaljer snarare än på specifikationer på marknadsnivå. De subtila problemen är de som skapar tidslinjestryck, eftersom de dyker upp sent och sällan presenterar sig som en enda, uppenbar rotorsak.
Hantera snabba transienter och dynamiska laster
Moderna processorer och RF-sektioner kan kräva stora strömsteg på mikrosekundstider. En PMIC kan verka perfekt acceptabel på papper men ändå visa dropp, överskjutning eller ringning när kontrollslingan, kompensationsmetoden, utgångsnätverket och PCB-parasitik tvingas att interagera i den verkliga layouten.
Dropp, överskjutning och ringning.
Team som testar transientrespons tidigt gör ofta det eftersom de har känt smärtan av att upptäcka det sent. Tidig validering kan minska risken för en obekväm omdesigncykel som involverar induktorer, utgångskondensatorer, kompensationskomponenter eller till och med PMIC-valet självt.
Induktorer, kondensatorer, kompensationskomponenter och PMIC själv.
Sekvensering som ett systemkontrakt, inte bara en bekvämlighet
Kraftsekvensering fungerar bäst när den behandlas som ett kontrakt över kiselkrav, firmware-antaganden och kortbeteende. När rampfrekvenser och ström-godkännings-timings avviker från vad processorens datablad förväntar sig, eller vad firmware implicit antar, tenderar intermittenta boot-problem att dyka upp.
Processorens databladskrav och firmwareförväntningar.
Vad som gör dessa problem särskilt frustrerande är deras tendens att försvinna under vänliga bänkvillkor och återvända under temperaturextremiteter, batterihot-plug eller marginala strömförsörjningsförhållanden. I dessa miljöer minskar deterministisk sekvensering och förutsägbar återställningsbeteende överraskningar och förkortar avlusningscykler.
Temperaturhörn, batterihot-plug-händelser och brunt ut-liknande förhållanden.
Skyddsbeteende som en tillgänglighet och servicekostnadsfaktor
Överströmsgränser, termisk avstängning och UV/OV-skydd diskuteras ofta i termer av säkerhet, men de distribuerade produkterna upplever dem som tillgänglighetsfunktioner. En PMIC som graciöst begränsar ström, rapporterar fel med tillräcklig tydlighet för att vara åtgärdbara och återhämtar sig på ett kontrollerat sätt kan förhindra att ett mindre perifert fel övergår i en fullständig systemavbrott och en supportbiljett.
Skyddsmekanismer: Överströmskydd, termisk avstängning, undervoltskydd och överspänningsskydd.
Systemtillförlitlighetsfördelar: Graciös strömbegränsning, felrapportering och kontrollerad återhämtning.
Det är ofta mer korrekt och faktiskt mer användbart under designavvägningar att tänka på PMIC som en del av systemets tillförlitlighetsarkitektur snarare än bara som en strömkonverterare. Designer som åldras väl tenderar att välja en PMIC baserat på hur konsekvent den upprätthåller förutsägbara krafttillstånd över normal drift, felhantering och övergångar.
När det synsättet tas på allvar, börjar detaljer som är lätta att nedtona under tidig planering att läsa annorlunda under integration. Rälsurladdningsbeteende, ström-godkännings signalintegritet och feltelemetri blir de egenskaper som skiljer en enhet som bara slås på i labbet från en enhet som startar rent, upprepade gånger och förutsägbart i fältet, utan att be ingenjörsteamet om tur.
PMIC-kategorier
PMICs är ofta märkta med en huvudfunktion, men i levererad hårdvara tenderar de att bete sig som ett kompakt, koordinerat kraftsystem istället för en enskild komponent med ett syfte. Ett praktiskt sätt att sortera PMIC-typer är att titta på (a) vad de reglerar, (b) vad de begränsar eller genomdriver, och (c) vad de ansluter, kopplar ifrån eller aktivt driver. Ur ett systemstartsperspektiv är den gräns som alltid återkommer mindre om linjär kontra switching och mer om huruvida PMIC:en byggdes för att hantera rail-till-rail interaktion under varierande belastning. När den interaktionen hanteras genomtänkt känns kortjänsterna lugnare under stresstester; när den inte gör det, kan samma design se bra ut på ett bänknätaggregat och bli temperamentsfull i en helt monterad produkt.
Primära funktionella grupperingar
Dessa block genererar rails, sätter driftpunkter och absorberar förändringar i ingångsförhållanden. De täcker typiskt allt från lågfrekventa tysta rails till högfrekventa digitala domäner.

• Linjär reglering (LDOs)
• Switching reglering (buck, boost, buck-boost, inverterande, laddpumpar)
• Framänds konvertering och förreglering (AC/DC-adaptrar, USB-PD sink-steg, fordonsförregulatorer på vissa plattformar)
Dessa block formar hur kraft får bete sig genom att definiera trösklar, övervaka gränser och reagera på fel. De kanske inte levererar watt, men de avgör ofta huruvida ett system misslyckas på ett tydligt sätt eller på ett mystiskt sätt.
• Spänningsreferenser och bandgap
• Övervakare, monitorer och fönsterkomparatorer
• Resetgenerering, watchdog-timrar och brunt upptäckts system
• Sekvensering, spårning och felrespons (UV/OV, överbelastning, termisk respons)
Dessa block avgör vart energi flödar, när den är isolerad och hur externa belastningar drivs. I verkliga designer är de där gränsfall, hot-plug, kabelnedgång, tillbehörsfel tenderar att dyka upp först.
• Kraftvägsförvaltning
• Lastbrytare och eFusar
• Batteriladdning
• Skärmrelaterade rails och drivare
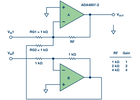
• MOSFET portdrivare
Reglerings-/konverteringstyper
LDOs väljs vanligtvis när låg utgångsbrus, enkel designflöde och snabb småsignalbeteende är önskvärda. De dyker ofta upp på RF-block, ljudrails, precisionssensorer och ADC-referensrelaterade strömförsörjningar där ripple spurs kan bli till mätbara prestandaförluster.

Värme är ofta den begränsande faktorn i reglerarens prestanda. När skillnaden mellan ingångs- och utgångsspänning ökar eller lastströmmen stiger kan effektavledning och temperatur bli viktigare än elektriska noggrannhetsspecifikationer.
En kraftrail som verkar stabil under öppen bänktestning kan utveckla betydande värmeproblem inuti stängda system eller högtemperaturmiljöer där luftflöde och termiska marginaler är begränsade.
Buck-konverterare tar mycket av arbetsbördan för effektiva kärnrails: applikationsprocessorer, DSP:er, DDR-rails och andra högströmiga digitala domäner. I praktiken kan två kort i bruk av samma buck bete sig mycket olika beroende på kontrollmetod, driftlägen vid lätt last och layoutdrivna parasiter.

• Kontrollmetod (spänningsläge, strömläge, hysteretisk, konstant på-tid)
• Lättlastbeteende (PFM, pulsutskippning, tvingad PWM)
• Transienta respons kontra utgångsripplande avvägningar
• EMI-hållning (spridningsspektrumalternativ, switchfrekvensval, layoutkänslighet)
En detalj som tenderar att skärpa designgranskningar är lastprofilsverkligheten. En konverterare som ser utmärkt ut vid 2 A kan spendera största delen av sin livstid vid 20–200 mA, där lägesövergångar, portladdningsförlust och växlingsoverhead dominerar. Att bara jämföra topp-effektivitet värden kan leda till att batteriets livslängd i verklig drift blir sämre än vad som förväntades från initiala uppskattningar.
Boost-konverterare tillämpas vanligtvis när den målrail som måste överskrida källan, vanliga exempel inkluderar att generera 5 V från ett enskilt batteri, skapa skärmningsbiasrails eller mata LED-strängar. Buck-boost-topologier föredras när ingången kan korsa över och under den önskade utgången, såsom att upprätthålla en stabil systemrail över hela batteriets urladdning.
Dessa konverterare löser ofta systemnivåproblem, som att hålla en 5 V-domän stabil medan batteriet dämpas, men den lättnaden kommer med fler rörliga delar: kompensationskomplexitet, switchströmsbegränsningsbeteende och genomförd EMI som kan vara överraskande känslig för kortgeometri och kabelförhållanden.
I telefoner och små IoT-moduler är AC/DC-kontaktpluggen vanligtvis utanför produkten, men framänds förhandling och ingångsskydd hamnar allt mer inuti enheten. Även när ett datablad marknadsför dessa som USB-funktioner snarare än PMIC-funktioner, formar de starkt nedströms konverterarstorlek, värmefördelning och sämsta fall stress.
• USB-PD-detektering och förhandlingsstöd
• Inmatströmsbegränsning och inrush-kontroll
• Överspänningsskydd för USB-tillbehör och adaptrar
Precision Support Blocks
Referenser ankare noggrannhet för ADC: er, DAC: ar och komparatorter och förhållanden. I blandade signalprodukter är de detaljer som upprepade gånger spelar roll driftbeteende, brusdensitet och PSRR över det relevanta frekvensområdet. Det kan kännas kontraintuitivt, men en liten mängd referensbrus kan visa sig som mätbar jitter, sensorfel eller tröskelambivalens när det multipliceras med verklig förstärkning och filtreringsval.
Övervakare övervakar skenor för underspänning, överspänning och sekvenseringsöverträdelser. I fler-skeners system hjälper de till att undvika halv-levande tillstånd där ett domän startar och börjar exekvera medan ett annat domän är sent, brunt eller oscillera.
Från ett tillförlitlighetsperspektiv tenderar robust övervakning att minska den typ av intermittenta fältreturer som frustrerar alla: problem som endast uppstår vid kalla starter, lågt batteristart, snabba hot-plug-händelser eller gränskablar som aldrig var i labbets "lyckliga väg".
Sekvensering handlar om mer än skena A och sedan skena B. Det blir en diskussion om tidsavvikelser, ramplutningar, återställningsrelationer och vad systemet gör när en skena missar sitt fönster.

SoC-dokumentation specificerar ofta IO-before-core beroenden, minnesutbildningsbegränsningar och exakt tidpunkt för återställning. PMIC: er med programmerbar sekvensering och kontrollerade ramper kan minska extern limlogik och göra att uppstart känns mindre som ett gissande, särskilt när korten itererar snabbt och små tidsändringar kan spara dagar av felsökning.
Power-Path och Drivfunktioner
Power-path-logik avgör om systemet körs från USB, batteri eller en blandning av båda, och det påverkar vad som händer under övergångar.

• Sömlös switchover-beteende (begränsa droppar som utlöser återställningar)
• Inmatningsströmsbegränsning för att matcha USB/adaptrar och efterlevnadsbegränsningar
• Idealdiodbeteende för att reducera bakström
En återkommande fälla i verkligheten är att underskatta motståndet i kablar, kontakter och skydelelement. Under en snabb transient kan PMIC bete sig precis som avsett och systemet kan fortfarande bruna ut eftersom den uppströms vägen sjunker mer än modellen antog. De felen känns "orättvisa" tills hela vägimpedansen mäts och behandlas som en del av designen, inte en fotnot.
Laddare varierar i batterikemi, kretstopologi, termiska egenskaper och designmål. Vanliga prioriteringar inkluderar snabbare laddning, lägre yttemperatur, minskad EMI, eller att upprätthålla systemprestanda under laddning.
• Linjära laddare
• Växelladdare
• Power-bank/OTG-lägen
Urvalet handlar ofta om termiskt budget, reglerings- eller interoperabilitetsbegränsningar och om enheten förväntas upprätthålla full prestanda under laddning utan att kännas seg eller köras obekvämt varm.
Lastbrytare används ofta för att styra skenor för standby-strömlägre och isolera domäner under fel- eller fraktillstånd. eFusar lägger till programmerbara strömbegänsningar, fel-timrar och kontrollerat påslagbeteende.
I många produkter betalar dessa block tillbaka sitt kretskortområde genom att förvandla röriga felmodeller, kontaktkortslut, tillbehörsfel, felaktiga anslutningar, till avgränsade incidenter istället för kaskadåterställningar eller fysisk skada som är kostsam att diagnostisera och ännu svårare att reproducera.
Visningssystem kräver ofta flera strömrails såsom AVDD, VGH och VGL med noggrant kontrollerad uppstartssekvensering för att undvika synliga visningsartefakter. LED-drivrutiner måste också reglera strömmen exakt och svara tillförlitligt på öppna strängar och kortslutningsfel eftersom dessa förhållanden vanligtvis inträffar under drift.
Grinddrivare och högre effektstadier blir allt mer relevanta inom robotik, fordons- och industriutrustning, där motorstyrning och högspänningskonvertering korsar PMIC-liknande samordning, telemetri och skyddspolicys.
Den typiska "Telefon/IoT PMIC"
I många telefoner och kompakta IoT-moduler förstås en PMIC bäst som en avsiktlig blandning av block snarare än en enda kategori. Integrationen syftar vanligtvis till att minska PCB-området, förenkla sekvensering och ge firmware en enda plats att observera och påverka strömhantering.
• Flera hög-effektiv buck-konverterare för CPU, GPU, minne, och alltid-på rails
• En eller flera LDO:er för låg-brus analog och RF rails
• Laddare och power-path-kretsar för USB och batterikoordination
• Övervakare, sekvenserare, termisk kontroll och avbrottsrapportering för telemetri och felhantering
Vad som tenderar att dominera resultaten är railinteraktion. En buck transient kan koppla in i en RF LDO genom delad jordimpedans. Laddarens termiska foldback kan tysta sänka den tillgängliga systemströmmen, och den förändringen kan dra en kärnrail in i droop under en arbetsbelastningsspike. Konstruktioner som utvärderar varje block i isolering ser ofta rena ut under tidig bänktestning och blir sedan besvärliga under integrerad stresstestning, när allt växlar, värms och förhandlar samtidigt.
Val och integration
Switchingregulatorer väljs typiskt för att minska dissipationen, men de kan introducera ripple och EMI som sprider sig in i känsliga områden. LDO:er lugnar ofta ljud, men kostnaden visar sig som värme när spänningsspelen är generösa eller strömmen är betydande.
• Switchingregulatorer: högre effektivitet, mer arbete med ripple/EMI hantering
• LDO:er: lägre ljud, högre värmeavledning när spänningen sänks
En kompromiss som ofta fungerar bra är att använda en buck för att skapa en intermediär rail, och sedan använda en LDO för den slutliga känsliga rail, så länge som headroom och termiskt beteende planerades med avsikt istället för att lämnas över efter andra beslut.
Snabba belastningsförändringar kräver snabba kontrollsllepp, korrekt kompensationsdesign och tillräcklig utgångskapacitans för att upprätthålla stabil reglering under de första mikrosekunderna av respons. Valet av kondensator handlar mer än bara om att öka kapacitansen. Effektiv kapacitans kan minska på grund av DC-bias, temperaturförändringar och åldrande. ESR och ESL påverkar också kretsstabilitet, transienta respons och EMI-prestanda, vilket gör dem till viktiga designöverväganden.
Team som validerar med den exakta kondensator dielektrik, spänningsklass och kapselstorlek avsedda för produktion tenderar att undvika överraskningar i stabilitet i ett sent skede, särskilt när leveranskedjor tvingar ekvivalent substitutioner som endast är ekvivalenta på papper.
PMIC-beteende under fel kan konstrueras kring olika filosofier. Ett tillvägagångssätt försöker smidig nedgradering, brownout-hantering, throttling-hintar till processorn, selektiv railavskärmning, så att systemet förblir användbart i ett reducerat läge. Ett annat tillvägagångssätt upprätthåller deterministisk avstängning för att snabbt nå ett känt säkert tillstånd.
• Smidig nedgradering: ofta anpassad till användarupplevelsemål i konsumentprodukter
• Deterministisk avstängning: ofta anpassad till förutsägbar beteende i säkerhetsinriktade designer
Den PMIC som passar bäst är vanligtvis den vars sekvensering och felrespons matchar produktens avsedda beteende, inte den som råkar annonsera den längsta checklistan.
Högre växelfrekvenser och bredbandsgap kraftsteg ökar uppnåbar effekt-täthet, men de skapar också striktare PCB-layoute krav och större EMI känslighet. Samtidigt blir programvarufunktioner såsom telemetri, avbrott, loggning och programmerbara kontrollpolicyer viktiga faktorer i den övergripande kraftsystemhanteringen och integrationen.
PMIC som upprätthåller förutsägbart kraftbeteende under verkliga arbetsbelastningar kan avsevärt minska debuggtiden, särskilt i system som hanterar radio, processorer, laddningsoperationer och termiska gränser samtidigt.
PMIC Tillämpningsområde
PMIC:er dyker upp överallt där elektrisk energi måste konverteras, distribueras, sekvenseras, observeras och skyddas samtidigt som förluster och störningar hålls under kontroll. De används rutinmässigt inom konsument-, företags-, fordons- och industriella designer, men den skiljelinje handlar vanligtvis inte om slutmarknaden, det är vad kraftträdet ser ut i praktiken. Ögonblicket en produkt innehåller flera rail med olika ljudtoleranser, olika steg-laddningsbeteenden och olika felväntningar, slutar PMIC:en att kännas som ett “delval” och börjar agera som en formande kraft på systembeteendet. I många verkliga designer, när en högpresterande processor paras ihop med radio, sensorer, minne och höghastighets I/O, begränsar kraftarkitekturen vad plattformen konsekvent kan leverera, även när beräkningen och programvaran ser solida ut på papper.
Där PMIC Beteende Sätter Gränser för Resultat i Verkliga System
Lasttransientrespons som tyst sätter taket
Moderna CPU:er och GPU:er drar abrupta strömspikar under boost- och burstaktivitet, och dessa steg kan vara förvånansvärt oförlåtande. När PMIC:ens kontrollsllepp, utgångskapacitans och distributionsimpedans inte kan hålla railen inom snäva gränser, svarar programvaruteam ofta på sätt som är subtila men kostsamma: de förkortar boostfönster, kapar toppklockor eller sätter in bredare skyddszoner så att krascher inte dyker upp i fältet. Från en ingenjörssynpunkt kan den handeln kännas frustrerande eftersom plattformen kan se effektiv ut medan den fortfarande lämnar prestanda på bordet under realistisk trafik.
Team som bara validerar med statiska laster eller snygga labbmönster tenderar att lära sig detta sent. Verkliga arbetsbelastningar skapar ojämna kanter: korta spelpulsar, AI-inferensspikar och radiokommunikationshändelser kan producera spänningsfall som aldrig uppstod när strömförsörjningen testades med en vänlig bänkningsprofil. Den obekväma lärdomen är att repetitiv transiente beteende under röriga arbetsbelastningar ofta ger mer användbar prestanda än att jaga ett smickrande effektivitetstal vid en enda driftpunkt.
Ripple och bredbandsbrus som blir signalkvalitets skuld
Ripple bör inte behandlas endast som en analog prestandaparams. Växlande harmoniska och bredbandsbrus kan påverka ADC-upplösning, öka RF-fasbrus och minska SERDES-signalmarginal, särskilt när nätverksrail delar returvägar eller kopplar genom paket och PCB-induktans. En strömförsörjning som verkar ren i enkel-rail-testning kan uppträda mycket annorlunda nära hög hastighetsgränssnitt, antenner eller täta minnessektioner.
Layoutrealiteter ändrar också berättelsen. Mekaniska begränsningar och skyddsområden tvingar fram kompromisser, och dessa kompromisser kan förstärka kopplingsvägar som var osynliga i en ideal layout. I praktiken förtjänar en kraftlösning förtroende när den förblir stabil och tyst under ofullkomlig placering och icke-ideal ruttning, inte bara när den mäts i en bästa möjliga demo-konfiguration.
Start och sekvensering som formar tillförlitlighetresultat
Ström-sättningsordning och rampbeteende avgör om minnesutbildning genomförs konsekvent, radioapparater kalibreras utan konstiga hörnfel, och ständigt pågående domäner förblir stabila genom brownouts. Marginell sekvensering ger ofta den typ av felmönster som dränerar tid och moral: "ett av femtio uppstarter", svårt att reproducera, och ännu svårare att felsöka när systemet är helt integrerat.
Sekvensering tenderar att fungera bättre när det hanteras som en del av återställning och återhämtningsbeteende snarare än en sen kontrollista. Konstruktioner som håller i produktion brukar behandla hela ström-sättnings/strömsläckningsvägen som en upprepbar tillståndsmaskin, och sedan bevisa det under sämsta rampfrekvenser, kall temperatur och låga batteriförhållanden. Automatisk strömcykling är ofta där förtroendet tjänas, eftersom det blottlägger de intermittenta kanterna som några manuella strömbrytningar aldrig avslöjar.
Urvalskriterier som systemhandelsutrymme
Effektivitet utvärderas över lägen, inte som ett trofénummer
Effektivitet ändrar betydelse beroende på hur produkten faktiskt spenderar sin tid. Spärrlastseffektivitet kan verka imponerande i specifikationer, men faktisk batteritid och termisk prestanda beror på många driftvillkor, inklusive burstbehandling, normal belastning, lätt last och djupt viloläge. Växande förluster, ledande förluster och viloström konkurrerar på olika sätt i varje region, och "vinnaren" växlar med arbetsbelastningsprofilen.
För batteridrivna konstruktioner dyker ofta låg Iq och stark lättlastseffektivitet direkt upp som längre tid mellan laddningar, vilket produktteam brukar bry sig om på ett mycket konkret sätt. För servrar och nätverksutrustning dominerar oftast ledande förluster och termiska begränsningar eftersom upprätthållen ström och värmeavledning blir den dagliga verkligheten. Ett grundat sätt att besluta är att kartlägga effektivitetmål till tidsfördelningen av arbetsbelastningar, istället för att optimera en driftpunkt som nästan aldrig inträffar i fältet.
Termiskt spelrum som förhindrar att prestanda kollapsar under värme
Termiska gränser definierar ofta den maximala hållbara strömmen, vilket i sin tur definierar den maximala hållna beräkningen. En PMIC kan se elektriskt utmärkt ut och fortfarande missa systemmål om dess paket, koppar och placering skapar lokala hetpunkter nära minne, skyddande burkar eller temperaturkänsliga RF-block. I verkliga monteringar kan små temperaturökningar utlösa nedbeteende, skyddströsklar eller långsiktiga tillförlitlighetsproblem som ingen vill förklara efter lansering.
Konstruktioner som åldras väl planerar vanligtvis för termisk slack. Den planeringen visar ofta upp som paketets termiska egenskaper som matchar belastningen, multifas kapabiliteter när strömprofilen rättfärdigar det, och en layoutstrategi som sprider värme samtidigt som den håller strömsslingor tillräckligt korta för att undvika att termiska lösningar blir brusproblem.
EMI-begränsningar som blåser upp schema och iterationskostnad
Växelfrekvens, kantfrekvenser och kontrolltopologi påverkar starkt om EMI kan hanteras med enkel filtrering eller blir en cykel av kretskortsvarv och sena labbsessioner. Datasheetsöverensstämmelse är bara en del av berättelsen; layoutkänslighet kan dominera utfallen. En lösning som kräver nästan perfekt slinga geometri kan bli ett vad när mekaniska begränsningar tvingar fram obekväm placering.
Många team föredrar ofta en något långsammare, mer kontrollerbar lösning, en med hanterbara slewrater och förutsägbart spektralt beteende, eftersom det minskar felsökningstiden och sänker certifieringsrisken. Det valet kan kännas konservativt, men det stämmer ofta överens med verkligheten att EMI-problem tenderar att dyka upp sent, när tidsplanen är minst tillmötesgående.
Skyddsfunktioner som definierar felupplevelse och servicebeteende
Skyddsbeteende påverkar starkt systemets respons under felvillkor. OCP, OVP, OTP och kortslutningsskyddsinställningar kan avgöra om systemet utför en ren avstängning, går in i latch-off-läge, eller upprepade gånger startar om med instabilt beteende. Dessa svar påverkar direkt felsökningssvårigheten, supportkraven och den övergripande produktens tillförlitlighetsuppfattning.
Skyddsåtgärder interagerar också med normala driftshändelser. Aggressiv strömbegränsning kan minska skaderisken, men det kan också utlösa upprepade omstarter under ögonblick av inrush-heavy eller startspikar. Felhantering fungerar vanligtvis bäst när den är inställd som en del av den avsedda service-strategin, och avgör vad som ska försöka igen, vad som ska låsas, vad som ska loggas, och vad som ska misslyckas snabbt, snarare än att lämnas som standard registreringsvärden.
Integrationskostnad som inkluderar firmware, validering och felsökningsverklighet
Integrationskostnaden stannar sällan vid BOM och PCB-området. Den inkluderar firmwarearbete, valideringsomfång, testtid, tillverkningsrobusthet och belastningen vid felsökning när något inte fungerar som förväntat. Högt integrerade PMIC:ar kan minska antalet komponenter, vilket är tilltalande, men de koncentrerar också risken: en sen justering på en rail kan utlösa re-qualification av en större del av kraftträdet än vad teamet planerat för.
Mer diskreta tillvägagångssätt kan öka layoutinsatsen och delhanteringen, men de kan också erbjuda moduläritet och lättare substitution om leveranskedjeförhållanden förändras eller om mid-life-uppdateringar förväntas. Den mer ärliga urvalslinsen är programmets riskaptit: tidskänslighet, förväntad iterationsantal och hur ofta designen sannolikt kommer att revideras efter första släppet.
Digitala kraftfunktioner: Flexibilitet som kommer med villkor
Telemetri, programmerbara railar och dynamisk spänningsjustering kan ge verkliga fördelar: snävare kraftoptimering, tydligare feldiagnoser och adaptiv prestandaskalning som följer arbetsbelastning och temperatur. Samtidigt drar dessa funktioner in firmwareberoenden, konfigurationskontroll, produktionsprogrammeringsdisciplin och helt nya felmodeller som inte finns i enklare analoga konfigurationer. Telemetri blir värdefullt först när den insamlade datan aktivt används för övervakning och designbeslut istället för att förbli oanvänd i diagnostiska instrumentpaneler.
Från en praktisk synvinkel tjänar digital kraft sin plats när den sluter en mätbar slinga. Om programmerbarhet kan användas för att återfå avkastning, förlänga batterilivslängd eller förhindra termisk dämpning med kontrollerade policyer, blir det ett starkt verktyg. Om det aktiveras helt enkelt för att det är tillgängligt, blir det ofta oanvänd konfigurationsyta som komplicerar validering, ökar risken för felaktig konfigurering i tillverkningen och skapar otydlighet om vilka inställningar som verkligen är avsedda.
Ett praktiskt urval och valideringsflöde som spårar systembeteende
Ett arbetsflöde som tenderar att hålla upp under press börjar från systembeteendemål snarare än att skanna en PMIC-katalog och hoppas att passformen fungerar senare. Det delar upp problemet i konkreta, testbara bitar och tvingar tydlighet om vad bra beteende betyder innan kortet tas upp.
• Omvandla arbetsbelastningstransienter till railkrav (tolererad dropp, inställtid, toppeffekt, repetitionsfrekvens).
• Definiera bullerbudgetar för känsliga block (ADC, PLL, SERDES, RF) och koppla dem till våggränser och layoutantaganden.
• Specifika sekvensering, återställningsberoenden och brownout-återhämtning som en tillståndsmaskin.
• Bedöm EMI-risk tidigt med realistiska placeringsbegränsningar och den avsedda skyddsansatsen.
• Validera skyddsbeteende med felinjektion som liknar verkliga kortslutningar, kabelhändelser och batterispänning.
ADC / PLL / SERDES / RF
Denna typ av tillvägagångssätt minskar överraskningar i det sena skedet eftersom den behandlar PMIC som mekanismen som styr kraftbeteende på systemnivå, inte som en bakgrundsnytta. När kraften utformas som ett förstasorters subsystem blir prestandan mer konsekvent, tillförlitligheten lättare att försvara med data, och efterlevnadsarbetet tenderar att vara mer förutsägbart, medan teamet spenderar mindre tid på att jaga intermittenta fel som härstammar från railar snarare än från logik eller programvara.
Framtida riktningar för PMIC:er
Högre effektdensitet och lägre kärnspänningar lämnar PMIC:er som reglerar med snävare elektrisk marginal och mindre tolerans för fördröjning. Eftersom spänningsledningar ligger närmare en digital lastens minimala arbetspunkt, kan även modest dropp visa sig som mjuka fel, omstarter eller prestandadämpning som känns "mystisk" under systemuppsättning. Detta flyttar gradvis designfokus bort från hur exakt en ledning ser ut i steady state och mot hur den beter sig under värsta fall, snabbt föränderliga lasthändelser.
Team möter ofta en obekväm verklighet: en loop som ser lugn ut på bänken kan fortfarande bete sig dåligt i produkten när verkliga arbetslaster skapar skarpa belastningssteg, lokala varma punkter och ojämn fasströmdelning. Ett mer resilient mönster är att behandla loopdesign, val av kraftstadier och PDN-impedans som ett enhetligt kopplat system, och sedan verifiera beteendet med representativa arbetslasters signaturer snarare än rena, idealiserade pulser.
Snabbare transients drar naturligt design mot snävare loopar, men snävare loopar gör också design mer exponerade för parasitisk induktans, toleransuppbyggnader och känslighetsbrus som är lätta att underskatta tidigt. I många program kommer skillnaden mellan stabil och fältstabil från förbättrad småsignalmodellering, trovärdig strömmätning och kompensation som är justerad med medvetenhet om den verkliga layouten.
Att höja switchfrekvens kan hjälpa, men det översätts inte automatiskt till bättre transientbeteende om mätvägen och PCB-geometri inte kan stödja den tillagda bandbredden. När den mismatchen händer, spenderas loopvinst på att förstärka brus, vilket kan yttra sig som skakig switchning, hörbara artefakter i vissa driftlägen, eller EMI-toppar som endast dyker upp efter mekanisk integrering.
Moderna databehandlings- och anslutningsblock genererar efterfrågan som är burstig och sammansatt, så transienta valideringar speglar i allt större utsträckning vad mjukvara och radion faktiskt gör snarare än vad en lastbox kan approximera med ett enda steg.
Många team konvergerar på en arbetsflöde som kombinerar:
• Laboratorielast stegning
• Plattform telemetri loggar
• Iterativa uppdateringar till kompensation och avkopplingsval.
Denna strategi tenderar att minska sena överraskningar, särskilt när termiska gränser långsamt omformar elektriskt beteende och flyttar marginaler över tid.
Trycket att minska storleken medan prestanda förbättras sträcker sig in i paketet och den omgivande strukturen, inte bara döden. Avancerad paketering och inbyggda passiva komponenter kan förkorta hög-di/dt-loopar, minska parasiteffekter och skärpa transiantrespons på sätt som känns omedelbart mätbara under debug. Integrerade magnetiska komponenter kan ytterligare öka effektdensitet, men fördelarna blockeras ofta av termiska vägar, mekaniska begränsningar, och hur kopplingen förändras när designen är inuti sitt verkliga hölje.
I distribuerade produkter kommer de mest hållbara vinsterna från integration ofta från att minska känslighet för byggvariation och stabilisera prestanda över tillverkningsspridning, snarare än att bara minska materialkostnaden.
Val av paket återspeglar allt mer elektriska och termiska resultat, inklusive lägre loopinduktans, förbättrad värmespridning och mer förutsägbar impedanskontroll. En vanlig lärdom i fält är att två kort med samma schema kan divergera kraftigt i beteende när en design bevarar en kompakt strömloop och den andra sprider kraftvägen över PCB:n.
När systemintegration ökar prioriteras layoutplanering ofta tidigare i utvecklingen eftersom senare komponentändringar inte alltid kan korrigera problem orsakade av dålig geometri eller PCB-routing.
Integrerade magnetiska komponenter kan öka effektiviteten vid högre frekvens och minska z-höjd, vilket är attraktivt i tätt paketerade produkter. Samtidigt kan de introducera nya kopplingsvägar och skapa termiska hot spots som är svåra att upptäcka tills sent i prototyper. Designer som går smidigt behandlar vanligtvis induktorn och paketet som ett kombinerat EMI- och termiskt samsponsrat ämne, inklusive placeringbeslut nära antenner, höghastighets tvåvägar och känsliga sensorer.
EMI-praktik tenderar att röra sig bort från enbart statiska åtgärder och mot kontrollstrategier som förutser driftsförhållanden. Tekniker som spridningsspektrum modulering, smartare grinddrivning, och rikare on-chip mätning kan minska toppar, men de kräver också samordning för att undvika att helt enkelt byta ut topputsläpp mot bredbandsbrus eller radiointerferens.
Många team har sett sekvensen utspela sig: tidiga EMI-kontroller godkänns, sedan misslyckas senare byggen när flera regulatorer växlar i korrelerade mönster, när ett nytt firmware-schema ändrar arbetslasternas timing, eller när kablar och skydd flyttar återvägar. Dessa erfarenheter trycker EMI-tänkandet uppåt till plattformsnivå snarare än att behandla varje regulator som en isolerad box.
När brytare blir snabbare, påverkar dv/dt-kontrollen i allt högre grad både utsläpp och långsiktig stress. Grinddrivare lägger till mer programmerbarhet, och skyddslogik blir mer medveten om kontext, vilket kan få justeringar att kännas mer som systemteknik än komponentval.
En praktisk vana som sparar tid är att justera kanttakten med mätningar som tagits i den slutliga mekaniska konfigurationen, eftersom skydd, kablar och jordstrukturer ofta förändrar EMI-resultatet på sätt som en bar krets inte avslöjar.
Förbättrad sensorik på chipet möjliggör adaptiva beteenden som att skifta växelbeteende när utsläppen närmar sig en gräns eller när driftsläget ändras. Över tid får detta PMIC:er att avvika från fast funktionsbeteende och mot hanterade delsystem som kontinuerligt förhandlar om prestanda, brus och termiska förhållanden baserat på feedback istället för antaganden.
Batteridrivna system fortsätter att jaga ultralågt viloström och stark ljuslastseffektivitet med tekniker som PFM/burst-operation, diodemulering och automatisk lägesval. Den känslomässiga spänning som många team känner igen är att samma lägen för lätt last som ser bra ut på ett datablad kan introducera svängningar, hörbara artefakter eller intermittenta EMI-signaturer som omedelbart märks även om den genomsnittliga effektiviteten ser utmärkt ut.
För att minska tvetydighet definierar team allt oftare vad acceptabelt vilobeteende betyder i konkreta termer, och väljer sedan lägesstrategi för att matcha.
Vanligt specificerade mål inkluderar:
• Svängningsgränser i sömn/viloläge
• Väkningslatens
• Akustiska/brusbegränsningar
• EMI-beteende under periodiska husrörelser.
I praktiken berättar batteriets livslängd under realistiska arbetscykler ofta historien mer tillförlitligt än topp effektivitetssiffror, särskilt när arbetscykeln inkluderar sömn, periodisk väckning, radioburst och sensorsampling.
Automatisk lägesväxling är attraktivt, men övergångar kan skapa kortvariga störningar som försvinner i genomsnittliga mätningar och visar sig endast som sällsynta omstarter eller intermittenta klagomål om brus. Designer som känns "solida" i fältet tenderar att lägga extra valideringsinsats precis vid gränserna mellan PFM och PWM, inklusive väkningssekvensering, sekvenseringsfördröjningar och gränstillståndslastiåker.
Ett upprepat mönster är att den mest aggressiva effektivitetinställningen inte alltid är det mest bekväma produktvalet när det producerar svängningar som varierar med förhållandena eller bullerkoppling som är svår att reproducera. Många team slutar med att välja en konfiguration som ger upp en liten mängd effektivitet i utbyte mot ett beteende som är upprepbart över temperatur, variationsbyggnad och scenarier, vilket ofta minskar integrationsrisk och minskar stödflöde.
När dataplattformar skalas upp lutar de sig alltmer på noggrann telemetri, adaptiv spänningsskalning och skydd som koordineras över flera spår. Telemetri spelar en praktisk roll i det dagliga ingenjörsarbetet: den kan förkorta uppstarten, snabba upp rotorsaksanalys och minska frestelsen att överdesigna "bara för säkerhets skull" genom att avslöja var marginalerna faktiskt ligger.
Telemetri tenderar att vara mest betydelsefullt när förhållandena snabbt förändras, inte när spåret är stabilt och lätt att mäta. Framtida PMIC:er är sannolikt att förbättra samplingbeteende, filterval och tidjustering så att programvaruval spårar verkligheten mer noggrant.
En nyans som erfarna team tenderar att uppskatta är att fler prover inte automatiskt är mer användbara; konsistens, kalibreringsstabilitet över temperatur, och tydliga definitioner av bandbredd och latens avgör ofta om datan kan ageras på med säkerhet.
Med fler spår kommer ett starkare behov av koordinerat skyddsbeteende så att systemet svarar sammanhängande istället för spår-för-spår.
Skyddssamordning omfattar ofta:
• OCP-responsbeteende
• OVP-responsbeteende
• UVP-responsbeteende
• OTP-responsbeteende
• Sekvenseringsberoenden
• Felåterställningspolicyer
• Statusdelning över PMIC:er
Verkliga system misslyckas ofta inte för att en funktion saknas, utan för att spår svarar olika på samma händelse, vilket resulterar i bruna kaskader eller omstartsloopar som är frustrerande att diagnostisera. Ett koordinerat felhanteringsförfarande, delad status plus en enad återställningsplan, matchar bättre hur plattformar förväntas bete sig under stress.
Antagande av GaN och SiC kommer att öka inom områden där växelfrekvens och effektivitet påtagligt förändrar storleken eller prestandanivån. Snabbare växling kan krympa magnetiska komponenter och skärpa övergångsresponsen, men det ökar också påfrestning relaterad till dv/dt, EMI-känslighet, och krav på gate-drivdesign och isoleringsstrategier. Begränsningarna är inte enbart elektriska; de involverar också driftsgränser över tillverkningsvariationer och verkliga felanvändningsscenarier som team har lärt sig att ta på allvar.
GaN och SiC-lösningar tenderar att belöna precis gate-drive kontroll, disciplinerad layout, och skyddssystem som förhindrar överskott, ringning och oavsiktlig påslagning. En praktisk insikt som återkommer är att layoutkvalitet kan dominera enhetsvalet; en välarbetad layout med en ”modest” enhet kan överträffa en premiumenhet placerad i en bullrig, induktiv slinga.
I takt med att växlingshastigheterna ökar, blir isoleringsval och långsiktiga tillförlitlighetsgränser mer framträdande i designgranskningar och kvalificeringsplanering. Antagande accelererar vanligtvis där prestandavinster tydligt motiverar extra designrigor, medan kostnadskänsliga eller bullerkänsliga produkter ofta rör sig mer försiktigt och kräver tydligare bevis på systemnivåfördelar.
PMICs formas alltmer för att fungera som policyutförare som reglerar effektivitet, buller, värme och tillförlitlighet i realtid. Arkitekturer som åldras väl behandlar kraft som en hanterad resurs: PMIC-telemetri informerar mjukvarupolicy, och mjukvarupolicy justerar i sin tur PMICs driftslägen och railsbeteende. Detta suddar ut gränsen mellan hårdvaru- och firmware-ägarskap på ett sätt som kan kännas obekvämt till en början, men som ofta lönar sig genom att minska marginalstackning och förbättra motståndskraften under verkliga arbetsbelastningar.
Slutsats
Effektivt kretskydd beror på mer än att lägga till en enskild skyddskomponent. Pålitliga designer kräver korrekt samordning mellan överspänningsavledning, spänningsklämning, strömbegränsning, jordning, layout och fel-timing. Varje skyddsenhet har sina egna styrkor och begränsningar, så valet måste matcha den förväntade feltypen, energinivån, responstiden och driftsmiljön. En välplanerad skyddstrategi förbättrar säkerheten, minskar felrisk och stöder långsiktig tillförlitlighet i verkliga elektroniska system.
Vanliga frågor (FAQ)
1. Varför betraktas en PMIC som en systemnivåskraftkoordinator snarare än bara en spänningsregulator?
En PMIC gör långt mycket mer än att konvertera en spänning till en annan. Den hanterar hur flera rails genereras, sekvenseras, övervakas, distribueras och skyddas över hela systemet. I praktiska designer koordinerar PMIC processorräls, minnesförsörjningar, RF-sektioner, sensorer och perifera domäner samtidigt som den hanterar uppstarts-timing, felsökning, termiska händelser och power-good signalering. Eftersom alla dessa beteenden interagerar under uppstart och drift blir PMIC ofta en av de viktigaste faktorerna som formar systemets tillförlitlighet och stabilitet.
2. Varför uppträder PMIC-relaterade fel ofta endast under verkliga arbetsbelastningar snarare än under enkla laboratorietester?
Bänktester med statiska laster reproducera sällan det snabba transienta beteendet som moderna processorer, RF-sändare, minnestrafik och sensorsprängningar genererar. Under realistiska driftsförhållanden upplever rails plötsliga strömspikar som avslöjar svagheter i transientsvar, PCB-parasitisk, kompensationsjustering och utgångsnätverksstabilitet. En PMIC kan verka stabil under kontrollerad testning men senare visa droop, överskott, ringning eller sekvenseringsfel när verkliga arbetsbelastningar skapar hastigt föränderliga elektriska krav.
3. Varför behandlas kraftsekvensering som ett systemnivåkontrakt istället för en enkel uppstartfunktion?
Många digitala system kräver specifika tidsförhållanden mellan kärnrails, minnesrails, I/O-försörjningar, återställningssignaler och alltid-på domäner. Om rails stiger i fel ordning eller med fel timing kan processorer, SRAM-behållningsblock och höghastighetsgränssnitt hamna i odefinierade driftsstatusar. Dessa problem skapar ofta intermittenta uppstartsproblem som endast uppträder under temperaturextremer, strömavbrott eller batterihot-plug-förhållanden. Korrekt sekvensering blir därför en koordinerad överenskommelse mellan hårdvara, firmware och kiselkrav istället för en bekvämlighetsfunktion.
4. Varför kan PMIC:ens transientsvar tyst begränsa den verkliga prestandan hos CPUs och GPUs?
Moderna processorer genererar plötsliga strömstegringar under boostoperation, AI-arbetsbelastningar, spelutbrott och radioaktivitet. Om PMIC inte kan upprätthålla stabil spänning under dessa händelser kan firmware minska boosttiden, sänka klockhastigheten eller bredda tidsmarginalerna för att förhindra krascher. I många produkter begränsar eldistributionens begränsningar tyst hållbar prestanda även om processorn själv verkar kapabel på papper. Stabil transientrespons har ofta mer inflytande på användbar systemprestanda än topp effektivitetsspecifikationer ensamma.
5. Varför skapar ripple och switching-brus från PMIC:er problem långt bortom strömforsyningens subsystem?
Switching-harmoniska och bredbandsbrus kan koppla in i RF-kretsar, ADC-referenser, PLL:er, SERDES-länkar och känsliga analoga vägar genom delad jordimpedans och PCB-parasit. Även relativt små ripple-nivåer kan minska ADC-noggrannhet, öka fasbrus, snäva tidsmarginaler eller försämra tillförlitlighet i högsidhastighetskommunikation. En skena som ser elektriskt acceptabel ut isolerat kan skapa allvarliga signalintegritetsproblem när den integreras i täta mixed-signal-system.
6. Varför definierar PMIC:s termiska begränsningar ofta maximala hållbara beräkningsprestanda?
När PMIC-temperaturen stiger minskar effektiviteten och termiska skyddsmekanismer kan börja minska tillgänglig ström eller utlösa återhållande beteende. I kompakta system kan lokaliserade hetställen nära processorer, minnen eller RF-sektioner tvinga PMIC in i termisk nedgradering långt innan teoretiska elektriska gränser nås. På grund av detta beror hållbar systemprestanda ofta lika mycket på termisk layout, kopparspreadning och paketeringsval som på regulatorernas specifikationer själva.
7. Varför kombinerar ingenjörer ofta buck-omvandlare med LDO-regulatorer i känsliga designer?
Buck-omvandlare ger effektiv spänningsreduktion för högströmsskenor men introducerar switching ripple och EMI. LDO:er generar en mycket renare utspännings med lägre brus men avger mer värme när de sänker större spänningar. En vanlig kompromiss använder en buck-omvandlare för att effektivt generera en mellanliggande skena, följt av en LDO för att rena den slutliga känsliga analoga eller RF-matningen. Denna kombination balanserar effektivitet, termisk hantering och brusreducering mer effektivt än att förlita sig på antingen topologi ensam.
8. Varför anses PMIC:s felresponspolicyer vara en del av den övergripande produktupplevelsen?
Felförhållanden avgör om produkten stänger av sig korrekt, går in i en omstartsloop, dämpar smidigt eller blir instabil under onormala förhållanden. Överströmsskydd, termisk avstängning, undervoltage-hantering och återställningstid påverkar direkt hur batterifel, kabelproblem eller överbelastningsevent upplevs. Väl utformade PMIC-policyer isolerar fel på ett förutsägbart sätt och återhämtar sig på kontrollerade sätt, vilket minskar servicekomplexiteten och förhindrar att mindre problem eskalerar till systemövergripande fel.
9. Varför förlitar sig moderna PMIC:er alltmer på telemetri och programmerbara effektpolicyer?
Moderna system ändrar dynamiskt arbetsbelastning, termiskt tillstånd, radioaktivitet och laddningsbeteende i realtid. PMIC-telemetri möjliggör för firmware att kontinuerligt övervaka skenförhållanden, strömförbrukning, temperatur och felhändelser. Dessa data möjliggör adaptiv spänningsjustering, termisk hantering, intelligent dämpning och samordnade skyddsbeschluts. Men programmerbara kraftsystem introducerar också ny valideringskomplexitet eftersom felaktig firmwarekonfiguration kan skapa fel som inte existerar i fasta analoga designer.
10. Varför rör sig framtida PMIC-designs mot "kraftorkestrering" istället för enkel effektkonvertering?
Framtida PMIC:er förväntas i allt högre grad samordna effektivitet, termik, EMI-beteende, skydd, arbetsbelastningsskala, laddningspolicyer och systemtelemetri samtidigt. Snabbare switching-teknologier, snävare spänningsmarginaler och mycket dynamiska arbetsbelastningar kräver att PMIC kontinuerligt anpassar sitt beteende baserat på verkliga driftsförhållanden snarare än statiska antaganden. Denna utveckling gör PMIC till ett aktivt hanteringssubsystem som arbetar nära med firmware och systemprogramvara för att upprätthålla stabil, effektiv och förutsägbar plattformsdrift under föränderliga förhållanden.
Besläktad blogg
-
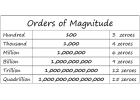
Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?
![Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?]()
2024/07/29
Miljoner representerar 106, en lätt greppbar siffra jämfört med vardagliga artiklar eller årslöner. Miljarder, motsvarande 109, börjar sträcka ... -
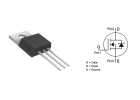
IRLZ44N MOSFET -datablad, krets, motsvarande, pinout
![IRLZ44N MOSFET -datablad, krets, motsvarande, pinout]()
2024/08/28
IRLZ44N är en allmänt använt N-kanals Power MOSFET.Det är känt för sina utmärkta växlingsfunktioner och passar mycket för många applikatione... -
Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?
![Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?]()
2024/10/6
Problem med avladdning av batteriladdning av mobiltelefoner är vanliga men kan hanteras effektivt.Temperaturen spelar en stor roll i batterieffektivi... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
BC547 -transistorn används vanligtvis i en mängd elektroniska applikationer, allt från grundläggande signalförstärkare till komplexa oscillatork... -
Omfattande guide till SCR (kiselstyrd likriktare)
![Omfattande guide till SCR (kiselstyrd likriktare)]()
2024/04/22
Kiselstyrda likriktare (SCR) eller tyristorer spelar en viktig roll i kraftelektroniktekniken på grund av deras prestanda och tillförlitlighet.Den h... -
LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare
![LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare]()
2024/07/15
LR621- och SR621SW -knappbatterier är utbredda i kompakta elektroniska enheter som klockor, små leksaker, kalkylatorer och fjärrnycklar.Flera tillv... -
Grundläggande av op-amp kretsar
![Grundläggande av op-amp kretsar]()
2023/12/28
I den komplicerade elektronikvärlden leder en resa till dess mysterier alltid oss till ett kalejdoskop av kretskomponenter, både utsökta och komple... -
En komplett guide till multiplexerare och deras roll i digitala system
![En komplett guide till multiplexerare och deras roll i digitala system]()
2025/09/20
Multiplexerare är komponenter i digitala system, utformade för att kanalisera flera insignaler till en enda utgångslinje med binära logik och styr... -
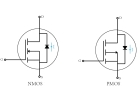
Jämförelse av NMO: er och PMOS -skillnader och applikationer
![Jämförelse av NMO: er och PMOS -skillnader och applikationer]()
2024/11/15
Att förstå skillnaderna mellan NMO: er och PMOS -transistorer är viktigt för att utforma effektiva kretsar.NMO: er (N-typ metall-oxid-halvledare) ... -
CR2450 vs CR2032 Jämförelse: allt du behöver veta
![CR2450 vs CR2032 Jämförelse: allt du behöver veta]()
2025/09/15
Knappbatterier som CR2450 och CR2032 driver många vardagliga elektronik, från klockor och fjärrkontroller till medicinska och industriella enheter....




Heta delar
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP