- Svenska
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Variabla frekvensdrivningars arbetsprinciper, kontrollmetoder och tillämpningar
Katalog

Översikt av variabel frekvensdrift (VFD)
En variabel frekvensdrift (VFD) är en kraft-elektronikkontroller som reglerar en AC-motors hastighet och vridmoment genom att justera statorns elektriska frekvens medan den koordinerar utgångsspänning och ström så att motorernas magnetiska flöde och vridmomentproducerande ström hålls inom ett arbetsbart driftsområde. På anläggningsgolvet tenderar den att visa sig mindre som en enkel "hastighetsinställare" och mer som en disciplinerad vridmoment- och strömregulator som råkar producera den kommenderade hastigheten när de elektriska förhållandena vid motorterminalerna hålls under kontroll.
För de flesta AC-motorer bestäms den elektriska frekvensen till stor del av den roterande magnetfältshastigheten och motorhastigheten, där induktionsmotorers slipp ger en liten skillnad mellan de båda. När frekvensen förändras justerar driften spänningen för att upprätthålla korrekt magnetflöde. För lite flöde kan minska vridmoment och respons, medan för mycket flöde kan öka ström, värme och ljud.
Många moderna drivningar kontrollerar också motorströmmen direkt för att upprätthålla stabilt vridmoment vid låga hastigheter, under plötsliga belastningsförändringar eller när motoregenskaperna ändras på grund av temperaturvariationer.
Vid idrifttagning och felsökning är det vanligt att känna att frekvenskontroll borde förklara allt, tills den första snabba accelerationen, plötsliga bromsningen eller belastningstöten avslöjar luckorna. Skillnader i daglig prestanda mellan drivningar visar sig ofta i kvaliteten på strömavläsningar, strömloopjustering och hur smidigt driften hanterar transienter snarare än i den grundläggande frekvenskommandot själv.
De flesta industriella VFD:er använder en AC–DC–AC-struktur eftersom den tenderar att vara robust, kostnadseffektiv och anpassningsbar över ett brett spektrum av motortyper och driftprofiler.

En frontändsrektor konverterar inkommande AC till DC. Den vanligaste implementeringen på trefassystem är en 6-diodbro. Den ungefärliga DC-bussnivån utan belastning är:
VDC ≈ 1.414 × VLL
Exempel som ofta ses i fältmätningar:
• 380 VAC trefas → ~537 VDC
• 220 VAC enfas → ~311 VDC
En diodbro är enkel och pålitlig, men den drar icke-sinusformig ström från elnätet, vilket kan skapa harmoniska och öka påfrestningar på svaga kraftsystem. I vissa installationer kan problem som störande avstängningar, transformatoruppvärmning eller instabil drift orsakas av interaktionen mellan harmoniska strömmar och linjeimpedans snarare än av själva motorn.
Vanliga mitigationsalternativ i industriella paneler:
• Linjereaktorer (AC-dämpare)
• DC-länkdämpare
• EMI/RFI-filter
Rektifieraralternativ som ibland väljs för specifika beteenden:
• SCR (tyristor) likriktare för begränsad kontrollerad laddning (nu mindre vanligt i nya byggen)
• Aktiva frontändar (AFE) som använder IGBT:er för att förbättra effektfaktorn, minska harmoniska och möjliggöra regenerering tillbaka till nätet
Ett praktiskt sätt att rama in beslutet om likriktaren är att det definierar hur driften fungerar med kraftsystemet. Ett överraskande antal problem som initialt skylls på motorer visar sig spåra tillbaka till inkommande kompatibilitet och linjebetingelser.
Vid energisering ser DC-länk kondensatorer initialt ut som en kortslutning. Utan insugningskontroll kan likriktaren och skyddet ovanifrån se en abrupt strömspik som känns som en hård stöt mot systemet. De flesta drifter hanterar detta med en förladdningsväg som begränsar strömmen medan bussen laddas, och övergår sedan till normal drift.
Typiska förladdningselement:
• En serie resistor i DC-bussen under uppstart
• En bypass-kontaktor eller relä som stängs när kondensatorns spänning stiger
I verkliga installationer framträder förladdningsfel ofta som intermittenta uppstartsproblem, laddningstidsutlarm och kontaktorgnissel. Vanliga orsaker inkluderar åldrande förladdningsresistorer, slitna bypasskontakter och undervoltsförhållanden under uppstart som hindrar driften från att slutföra laddningsprocessen korrekt.
DC-länken jämnar ut likriktarens vågform och tillhandahåller korttids energilagring när lasten ändras snabbare än källan kan svara. Den inkluderar vanligtvis flera element som var och en spelar en annan roll snarare än en enda "en del löser allt" lösning.
Typiska DC-länkkomponenter:
• Elektrolytkondensatorer
• Avledande och/eller balanserande resistorer
• Ibland filmkondensatorer för högfrekvent vågformdämpning
För högre buss spänningar kan kondensatorer kopplas i serie. Eftersom riktiga kondensatorer inte delar spänning perfekt, läggs balanseringsresistorer till för att minska ojämn spänningsfördelning som påskyndar åldrandet och kan driva en kondensator till ett tidigt felmodus. I servicearbete kan en drift fortsätta att fungera med försämrad kapacitans, vilket kan vara bedrägligt lugnande; sedan börjar den reagera skarpare på linjedippar, regenereringshändelser eller snabba laststeg. Den förändringen i "tolerans" är ofta den första ledtråden att DC-länkens hälsa sjunker.
På många platser når uppsättningen av DC-länk kondensatorer slutet av livslängd tidigare än IGBT:erna, inte för att designen är dålig, men för att värme och ripple-strömspänningar ackumuleras tyst över tid. Detta är anledningen till att luftflödesshantering, nedklassning vid höga omgivningstemperaturer och måttliga bärfrekvensval ofta ger tillbaka färre oförklarade trippar och färre ombyggnader av driften i medelåldern.
Inverterbrädan syntetiserar en kontrollerad trefas utgång från DC-bussen, vanligtvis med IGBT:er som drivs med PWM. Antiparallella dioder över IGBT:erna tillhandahåller en strömväg under switchingövergångar och stöder strömkonsekvens när motorns induktans "insisterar" på att behålla strömflödet.
PWM möjliggör tight kontroll, men det producerar också snabba spänningskanter (hög dV/dt). Att höja växling (bärfrekvens) minskar ofta hörbart ljud och strömvågform, samtidigt som det ökar växlingsförlust och intern uppvärmning. I praktiken involverar inställningar avvägningar som operatörer omedelbart kan känna, tystnad på motorsidan kontra temperaturmarginal inuti driften.
Vanliga driftsavvägningar:
• Lägre bärfrekvens: svalare drift, mer motorakustiskt ljud och vridmomentvågform
• Högre bärfrekvens: tystare motor, varmare drift, mer stress på komponenterna över tid
Kabellängd och motorens ålder kan driva uteffektkraven i en riktning som överraskar människor som bara tittar på namnskylts hästkrafter. Långa ledningar och äldre isoleringssystem kan behöva ytterligare åtgärder.
Vanliga tillägg på utgångssidan och metoder:
• dV/dt-filter eller sinusfilter
• Korrekt jordning och skärmning av kabelpraktiker för att minska lagerströmningar och EMI-problem
När en motor avvecklar eller lasten driver motorn (ett överhalande tillstånd), kan maskinen generera energi tillbaka in i DC-bussen. Bussens spänning stiger, och driften måste dirigera eller avleda den energin för att undvika en DC-övervolt trip. Detta är ett av de beteenden som kan verka slumpmässiga tills energiflödet ses tydligt: tröghet och hastighetsprofilval dominerar ofta resultatet.
Vanliga metoder som används för att hantera regenerativ energi:
• Dynamisk bromsning (broms-chopper + resistor): konverterar regenerativ energi till värme; allmänt använd eftersom beteendet är förutsägbart och hårdvaran är enkel
• Regenerativ frontänd (AFE eller separat regenereringsenhet): återför energi till nätet; ofta valt när bromsning är frekvent eller när energiåtervinning stämmer överens med driftsmål
• Längre avtrappningstider: minskar spikregenerativ effekt; ibland tillräckligt för att undvika att lägga till bromshårdvara
Vid felsökning stannar DC-överströmavbrott ofta efter att nedbromsningstiden har släppts eller bromshårdvaran har dimensionerats för att matcha den faktiska trögheten. Vad som ofta förbises är hur aggressivt hastighetsprofilen är konfigurerad i förhållande till den mekaniska energi som lagras i lasten.
VFD-kontroll sträcker sig från enkla skalära metoder till snabba strömreglerade metoder. "Känslan" av maskinen, särskilt vid låg hastighet eller under belastningssteg, beror starkt på vilken kontrollfamilj som används och hur bra motormodellen matchar verkligheten.
V/Hz upprätthåller ett ungefärligt konstant förhållande mellan spänning och frekvens. Det är ofta en bekväm lösning för fläktar och pumpar där vridmomentbegäran är rimligt förutsägbar och dynamiken är måttlig. Där den tenderar att visa sina begränsningar är vid låg hastighet vridmomentstyvhet och respons under plötsliga lastförändringar, där systemet kan kännas något vagt eller fördröjt.
Vektorstyrning (FOC) och DTC använder ström/spänning-sensorer och snabb beräkning (CPU/DSP) för att reglera flödesproducerande och vridmomentproducerande strömkomponenter. Resultatet blir en mer säker vridmomentrespons, särskilt nära noll hastighet och under snabba transienta, och hastighetsregleringen förbättras ytterligare när kodaråterkoppling används.
Vanliga prestandautfall förknippade med dessa metoder:
• Starkare vridmomentbeteende vid låg hastighet
• Snabbare reaktion på lastförändringar
• Tajtare hastighetsreglering, särskilt med kodaråterkoppling
I många installationer hjälper autotuningprocessen till att förbättra prestanda genom att matcha kontrollmodellen med de faktiska elektriska egenskaperna hos motorn istället för att förlita sig på standardparametervärden. Detta resulterar ofta i mer exakt och stabil motorstyrning.
En VFD förändrar mer än RPM. Det påverkar motorernas termiska beteende, mekaniska belastningsmönster och upstream kraftkvalitet, och dessa bieffekter tenderar att dyka upp efter att nyhetens behag av variabel hastighet har avtagit.
Vanligtvis förbisedda systemnivåeffekter:
• Motor kylning vid låg hastighet: axel-fläktar flyttar mindre luft; konstant-vridmoment låg-hastighetsarbete kan kräva en separat matad blåsmotor eller en motor med inverterarens driftklass
• Mekaniska stressmönster: jämnare acceleration kan minska chocklaster, medan aggressiva vridmomentgränser kan bidra till remsklipps, kopplingstress eller resonans
• Kraftkvalitet: diodfrontar introducerar harmoniska; flera drivsystem på en delad källa kan behöva koordinerad avhjälpning
• Skydd och säkerhet: integrerad fel detektion (överspänning, över-/underspänning, övertemperatur, jordfel) och funktioner som Safe Torque Off (STO) förändrar hur system är kopplade, validerade och underhållna
Stabilt resultat uppnås sällan genom att lämna allt på standard och hoppas att processen är mild. Förutsägbarhet kommer vanligtvis från en kort, metodisk installationsrytm, mindre dramatisk än hjältemodig felsökning men mycket mer tillfredsställande när maskinen körs rent skift efter skift.
En installationschecklista som ofta betalar sig vid igångkörning:
• Ange noggrant motor etikettdata (spänning, ström, frekvens, hastighet och effektfaktor om driften begär det)
• Välj ett kontrollläge som matchar lastprofilen (fläkt/pump, konstant vridmoment eller hög dynamik)
• Ställ in acceleration/nedbromsning baserat på tröghet och bromsförmåga snarare än personlig preferens
• Välj en bärfrekvens som speglar både ljudförväntningar och termisk huvudutrymme
• Verifiera jordning, kabeltyp och kabellängdpraxis innan du jagar intermittenta eller “spökgenererade” fel
En produktiv mental modell är att betrakta VFD:n som ett energirouting-system med tre distinkta uppgifter: forma ingångskraft vid linjesidan, buffra energi i DC-länken och reglera motorström på utgångssidan. När det flödet hålls i fokus tenderar återkommande problem, DC-överströmavbrott, svagt vridmoment vid låg hastighet, besvärliga fel och tidigt komponentåldrande att bli lättare att förklara, testa och korrigera.
Klassificering av VFD:er
Efter kraft- stages arkitektur
VSI-drivsystem används ofta i industriella system eftersom topologin är enkel och praktisk. Driften omvandlar AC-ingång till en DC-buss genom en diodbro eller aktiv front, och använder sedan en inverterare för att generera variabelfrekevens och variabelspänning kraft för motorn. Stora DC-busskapacitorer hjälper till att upprätthålla en stabil spänningsförsörjning och minska spänningsvariationer orsakade av lastförändringar.
I det dagliga uppstartsarbetet tenderar denna arkitektur att vara förlåtande för
vanliga variabla vridmomentlaster såsom pumpar och fläktar, vilket är anledningen till att den ofta ger ett gott första intryck i fältet. Samtidigt kan kombinationen av en styv buss och snabba växlingskanter höja dv/dt vid motorterminalerna, och den verkligheten blir svår att ignorera när motorledningar blir långa eller när äldre isolationssystem redan lever på lånad tid.
Vanliga beställningsdetaljer som regelbundet avgör om en VSI-installation känns ren eller rörig:
• Motor kabel längd och rutt
• Jording metod och kopplingskvalitet
• dv/dt eller sinusfilter strategin
CSI-drivningar har en annan inställning: en stor induktor i DC-länken trycker systemet mot relativt konstant DC-ström, och utgångsstadiet formar motorströmmen därefter. De specificeras mindre ofta idag, men de dyker fortfarande upp i hög effekt, medelhög spänning och tuffa miljöer där kontrollerat strömbeteende passar riskprofilen och driftskulturen i anläggningen.

I praktiken tenderar CSI att handla om bekvämlighet för förutsägbarhet. Hårdvarans fotavtryck är större, konfigurationens utrymme kan kännas smalare, och ekosystemet av lättillgängliga delar och tekniker är mindre än vad de flesta team förväntar sig med VSI. Ändå, för tillämpningar som stämmer överens med CSI:s styrkor, kan det mer stabila strömbeteendet kännas lugnande, särskilt när platsen värdesätter konservativ elektrisk stress och hållbar drift över kompakthet.
Typiska CSI-avvägningar som formar verkliga projekt:
• Större fysisk storlek och högre systemkomplexitet
• Färre mainstream servicealternativ och reservdelar
• Stark koppling till vissa MV- och tungt användningsfall
Drivdiskussioner handlar ofta om omvandlaren, men fronten är ofta det som avgör hur systemet beter sig på anläggningens buss och under bromsning. En diodfront är enkel och budgetvänlig, men den drar icke-sinusoidal ingångsström och kan normalt inte skicka energi tillbaka till nätet. En AFE kan förbättra ingångens effektfaktor, minska harmoniska och stödja regenerering.
Denna åtskillnad blir smärtsamt uppenbar i processer med frekvent nedbromsning eller överhalning av laster. När en maskin upprepade gånger trippas på DC-buss överspänning under snabba stopp, är det frestande att skylla på trimningen, men den obekväma sanningen är ofta en mismatch i energihantering: energi kommer tillbaka snabbare än systemet kan absorbera eller återföra den.
Framsidan och energihanteringsalternativ som ofta väljs i fältet:
• Diodfront
• Aktiv frontend
• Bromsmotstånd / dynamisk broms-chopper
• Regenerativ enhet eller delade DC-busslösningar
• Längre nedbromsningsramps som är anpassad till processtolerans
Klassificering efter svitschnings- och moduleringmetod
Äldre drivningar förlitar sig ibland på PAM eller tidigare moduleringstrategier kopplade till legacy kraftenheter och kontrollhårdvara. Dessa system förekommer fortfarande i långlivade utrustningar, och de kan fungera pålitligt, ända tills livscykelstödet börjar kännas som gissningsarbete. Jämfört med moderna PWM-ansatser ligger de vanligtvis efter när det gäller effektivitet, akustiskt beteende och kontrollerbarhet.
Från ett underhållsperspektiv är den känslomässiga "tryckpunkten" sällan prestanda, det är osäkerhet. När reservkomponenter blir sällsynta och dokumentationen är tunn, tenderar moderniseringsplanering att fokusera på övergång till moderna PWM-drivningar samtidigt som man respekterar befintliga motorer, kablar och processtoleranser.
PWM är den moderna normen eftersom den erbjuder flexibel kontroll av spänning och frekvens och stödjer kontrollmetoder som de flesta team förväntar sig idag. Space-vector PWM används i stor utsträckning eftersom det förbättrar DC-bussens nyttjande och kan minska harmonisk distorsion i motorströmmen.
En operationell detalj som erfarna tekniker lär sig att hantera med ödmjukhet är att kvaliteten på PWM-vågform alltid kommer med en kostnad. Renare ström kräver vanligtvis mer svängningsaktivitet, och det ökar svängningsförluster och termisk belastning. De bästa resultaten kommer vanligtvis från att balansera bärvågsfrekvens, termiskt utrymme och hörbara bullermål istället för att jaga en enda bästa inställning.
Vanliga PWM-konfigurationsreglage som rutinmässigt handlas mot varandra:
• Bärvågsfrekvens
• Termisk marginal och kylfläns/fläktkapacitet
• Förväntningar på hörbart brus
• Motorströmmsfluktuation och vridmomentfluktuationstolerans
Ökning av bärvågsfrekvens minskar ofta strömfluktuationerna och kan flytta svängningsbruset över det mest känsliga hörbara området. I ockuperade utrymmen kan den förändringen kännas som en lättnad, och i vissa maskiner förbättrar den direkt den uppfattade produktkvaliteten.
Begränsningen är värmehantering. Högre svängningsfrekvenser ökar omvandlarförlusterna, och det kan driva driften mot nedklassificering, starkare höljesluftflöde eller en större ramstorlek. Många fältklagomål som dyker upp som "mystisk överhettning" blir mycket mindre mystiska när bärvågsfrekvens, omgivningstemperatur, höljesrestriktion och arbetstid utvärderas tillsammans.
Värmerelaterade lösningar som ofta används för att stabilisera uppsättningar med hög bärvåg:
• Minska bärvågsfrekvensen till en realistisk nivå för arbetsscykeln
• Nedklassificera utgångsströmmen och revidera överbelastningsförväntningar
• Förbättra kapslingens ventilation eller värmeavledningsväg
• Byt till en större drivramstorlek
Mediumspännings-VFD:er använder ofta flernivåinvertertopologier för att minska spänningssteg och förbättra vågforms kvalitet. Bredbandsgap-enheter som SiC och GaN kan växla snabbare och mer effektivt, vilket kan kännas som en teknisk vinst, tills snabba kanter ökar dv/dt-stress och elektromagnetisk interferens i layouter som inte utförs med disciplin.
Ett pragmatiskt sätt att tänka på det är att snabbare växling kan förbättra kontrollbarheten samtidigt som installationsdetaljer blir mer synliga. När motorlagren visar tidigt slitage eller när sensorer börjar bete sig bullrigt, är orsaken ofta gemensam spänningsproblems och kablage/jordningspraxis snarare än någon brist i kontrollalgoritmen.
Installations- och åtgärdspunkter som ofta avgör resultat med snabba kanter:
• Motorledningens val och avskärmningstillvägagångssätt
• Jordning och bindningstopologi
• Utdata dv/dt-filter eller sinusfilter
• Mitigering av lagerström
• EMI-medveten layout och separering av signal-/kraftkabel
Klassificering efter Kontrollfilosofi
V/Hz-kontroll upprätthåller ett förhållande mellan spänning och frekvens som håller motorflödet inom ett genomförbart område. Det är enkelt, stabilt i många installationer och används allmänt på variabla vridmomentbelastningar som fläktar och centrifugpump.
Detta tillvägagångssätt tenderar att lysa när processen inte kräver tight vridmomentkontroll vid mycket låg hastighet. På fältet lyckas det ofta eftersom det minskar finjusteringsinsatsen och minskar chansen för oscillationer orsakade av felaktiga motorparametrar. Avvägningen är blygsam dynamisk respons, särskilt under snabba lastransfer där processen ber om och driften svarar ett slag senare.
Vektorstyrning separerar vridmomentproducerande och flödesproducerande komponenter genom att uppskatta eller mäta motorstatus. Sensorlös vektorstyrning kan prestera imponerande utan en enkoder, men den lutar sig tungt på noggranna motordata och rimligt stabila driftförhållanden. Sluten slinga vektorstyrning lägger till en enkoder eller resolver, vilket vanligtvis förbättrar vridmomentbeteende vid låg hastighet, noggrannhet och transienta respons.
I praktiken spåras många problem med vektorstyrning tillbaka till parametrar snarare än teori. Namnskapsuppgifter är ofta en utgångspunkt, inte en mållinje. En kort identifieringskörning, rimliga basfrekvensval och realistiska strömgränser förvandlar ofta en drivning som känns mjuk till en som håller hastighet och vridmoment på ett sätt som operatörer kan lita på.
Vektorstyrningsinställningspunkter som ofta avgör prestanda:
• Verifierade motornamnplåtdata
• Motor-ID / autotuningresultat och deras plausibilitet
• Basfrekvensval som är i överensstämmelse med motordesignen
• Ström- och vridmomentgränser som stämmer överens med mekaniken
DTC reglerar vridmoment och flöde mer direkt, vilket möjliggör mycket snabb vridmomentrespons i tillämpningar med skarpa transienta och krävande vridmomentbeteende.
Beslutspunkten är sällan enbart hastighet på respons; det handlar om hur det mekaniska systemet tolererar den responsen. En drivning som kan ändra vridmoment nästan omedelbart kan också excitera resonanser om ramper och gränser sätts aggressivt. De mest robusta installationerna behandlar motorn, kopplingen, växellådan och lasten som ett sammanlänkat system och formar acceleration profiler och vridmomentgränser för att matcha vad mekaniken kan absorbera utan protest.
Tillämpningsdrivna kategorier
Allmänna drivningar betonar bred kompatibilitet och kostnadsmedvetna funktionsuppsättningar. Högpresterande drivningar erbjuder vanligtvis stramare strömkontroll, rikare feedback- och I/O-alternativ, högre överbelastningskapacitet och mer avancerad diagnostik.
En insikt i urvalet som upprepade gånger dyker upp i verkliga projekt är att högpresterande funktioner ger mest avkastning när processen kräver upprepbarhet under störningar, inte bara när motorens betyg är stort. Många stora fläkt system arbetar smidigt med allmänna V/Hz, medan mindre system för spänningskontroll, indexering eller strikt hastighetsreglering ofta drar nytta av vektorstyrning och feedbackkapacitet.
Typiska separatorelement mellan drivklasser i upphandlingsdiskussioner:
• Överbelastningskapacitet och termisk modellens sofistikering
• Feedbackenhetens stöd (enkoder/resolver)
• Diagnostikdjup och spårnings-/övervakningsverktyg
• I/O-flexibilitet och integrationsfunktioner
Spindelapplikationer kräver hög elektrisk frekvenskapacitet, stabil hastighetsreglering och genomtänkt hantering av motoruppvärmning vid förhöjd RPM. Dessa drivningar betonar ofta snabb växlingprestanda och specialiserade motor skyddsfunktioner anpassade för spindlar.
I praktiken tenderar val av drivrutiner att gå smidigare när det respekterar spindelmotorernas isoleringssystem och lagerstrategi snarare än att fokusera snävt på högsta hastighet. När spindlar misslyckas tidigt, är huvudorsaken ofta termisk hantering, smörjning eller elektriska lagerströmmer, problem som kan vara frustrerande just för att de låtsas vara kontrollproblem.
Ingenjörskontroller relaterade till spindlar som ofta förhindrar obehagliga överraskningar:
• Motorisoleringens lämplighet för snabba kanter och hög frekvens
• Åtgärder för att mildra lagerströmmer
• Termiska gränser över det avsedda hastighetsområdet
• Kyl- och smörjningsantaganden under verkliga driftcykler
Enfasingångsdrev är vanliga i lätta industriella och kommersiella miljöer, men de är ofta nedgraderade eftersom ingångsströmmen ökar för samma utgångseffekt. Tre-fas ingång fördelar typiskt ingångsströmmen jämnare och skalar mer bekvämt när kraften ökar.
En praktisk installationsdetalj är planering av kapacitet uppströms. Olägenhetsutlösningar och överhettad kabeldragning spåras ofta till underskattning av enfasingångsströmmen, förbiseelse av inslagsbeteende eller ignorering av hur harmoniska svänger med skyddsenheter.
Uppströmsöverväganden som vanligtvis driver installationsresultat:
• Strömbrytare/säkring dimensionering och utlösningskurvval
• Ledardimensionering och temperaturökning i rör/tråg
• Inslags- och förladdningsbeteende
• Harmonisk påverkan på skydd och uppströmsutrustning
Funktionell terminologi
För de flesta AC-motorer kommer användbart vridmoment över ett hastighetsområde från att koordinera spänning med frekvens. Den koordineringen ligger i centrum för vad en VFD gör, även när kontrollmetoden är sofistikerad. Den underliggande begränsningen förblir densamma: motorflödet måste hållas inom rimliga gränser för att undvika svagt vridmoment på ena sidan och överhettning på den andra.
Ett jordnära sätt att tolka "VVVF" är som en påminnelse om motorfysik istället för ett varumärkesmärke. När man felsöker svagt vridmoment eller oväntad uppvärmning kommer klarhet ofta snabbt från att kontrollera om den beordrade spänningen, den beordrade frekvensen och strömgränserna faktiskt matchar motorens arbetspunkt och belastningskrav.
CVCF beskriver reglerade kraftkällor utformade för att hålla spänning och frekvens stabila, liknande i anda som leverans från ett verk. Den modellen är inte inriktad på att ändra motorhastighet.
När målet är hastighetskontroll tenderar CVCF att leda tanken i fel riktning. Hastighetskontroll bygger på variabel frekvens, och stabilt vridmomentbeteende följer vanligtvis när spänningen hanteras i takt med frekvensen under motor- och applikationsbegränsningarna.
Kontrolllägen för lågspänning VFD:er

Varför kontrollläge fortfarande formar verkliga resultat i moderna lågspänningsdrivande enheter
Moderna lågspännings, allmänna VFD:er (typiskt 380–690 VAC klass, cirka 0,75–400 kW, med 0–400 Hz utgång) ser ofta liknande ut från en hårdvarusynpunkt, vilket kan få team att förvänta sig liknande beteende på maskinen. I fältet visar skillnaden sig snabbt: kontrollläget dikterar i stor utsträckning hur driften känns när processen blir oreda, kalla starter, belastningssteg, långa kablar, marginalmotorer, och operatörer som inte övervakar justeringen.
Vad kontrollstrategin faktiskt påverkar är inte abstrakt; det blir en uppsättning dagliga egenskaper som underhåll och produktion märker.
Tokra förmåga vid låg hastighet; hastighetsbehållningsnoggrannhet; transientrespons på belastningssteg; akustiskt buller; harmonisk distortion; mototvärmning/termisk stress; känslighet för parameterdrift; känslighet för driftskvalitet.
I praktiken är det bästa driftsläget vanligtvis det som uppfyller vridmoment och responskrav medan det förblir stabilt över temperaturförändringar, belastningsvariation och icke-optimala driftsförhållanden. Läge som presterar bra endast under demonstrationer kan senare skapa problem om konstant omjustering, bullerklagomål eller instabilt beteende uppstår efter motorbyte eller systemförändringar.
Generation 1: SPWM med Fast V/Hz (Skalar kontroll)
Skalar kontroll håller ett ungefärligt konstant V/Hz-förhållande så att motorens luftspaltflöde förblir nära önskad nivå när frekvensen ändras. Med sinusoidal PWM (SPWM) är implementationen enkel, kostnadsprofilen är vänlig, och beteendet är vanligtvis stabilt när lasten är jämn och det användbara hastighetsområdet inte är extremt.
Vid låg frekvens är den kommenderade statorspänningen i grunden liten. Det gör att statormotståndets fall (I·Rs) blir oproportionerligt stort i förhållande till den applicerade spänningen, så flödet faller under den avsedda nivån. Resultatet är inte subtilt: vridmomentkapaciteten försvagas, motorn kan stanna under belastning, och vissa maskiner utvecklar en obehaglig "surge" eller oscillation som operatörerna tolkar som mekaniska problem.
Två ytterligare effekter förvärrar ofta frustrationen nära noll hastighet: inverterarens dödtid och halvledarspänningsfall. Dessa förluster minskar ytterligare den effektiva spänningen vid motorterminalerna, vilket är en anledning till att två drivningar med samma kW-skylt kan bete sig märkbart olika under smygande och positionering.
Installationer som håller sig till skalär kontroll men fortfarande vill ha acceptabelt beteende vid låg hastighet staplar vanligtvis flera praktiska justeringar. Var och en kan hjälpa, och var och en kan också skapa en ny feltyp om den pressas för hårt.
• Spänningsökning / IR-kompensation: lägger till extra lågfrekvent spänning för att kompensera för I·Rs; förbättrar startvridmomentet, men aggressiva inställningar kan överflöda motorn och öka uppvärmningen.
• Glidkompensation: lägger till frekvens som en funktion av lastström för att minska induktionsmotorns hastighetsfall; kan strama åt transportörer och mixer, men det kan också utlösa jakt när mekaniken är elastisk eller strömåterkopplingen är bullrig.
• Flera punkters V/f-kurvor: använder styckvis V/f-formning istället för en enda rak linje; kan få ett problematiskt hastighetsband att fungera, medan det gör lite annanstans.
• +Ramp-formning och strömbanor: justerar acceleration/bromsning och begränsande beteende; förhindrar ofta störande bortkopplingar på höginertialaster mer tillförlitligt än en enda "magisk" kompensationsknapp.
När applikationen vill ha starkt vridmoment vid väldigt låg hastighet, frekventa omkastningar eller skarpt vridmomentbegränsning tenderar skalär kontroll att bli en cykel av små förbättringar som aldrig riktigt känns färdiga. Maskinen kan fungera acceptabelt efter uppvärmning och konstant belastning, för att sedan förlora samordning efter temperaturförändringar, motorbyten eller förändringar i kabelns längd, precis den typ av variabilitet som får tekniker att misstro installationen även om den ser bra ut på papper.
Generation 2: SVPWM med Förbättrad Skalär Kontroll
Rymdvektor PWM (SVPWM) använder omvandlarens växlingsvektorer mer effektivt än traditionell SPWM. Det praktiska resultatet är högre DC-bussutnyttjande och lägre harmonisk distorsion för samma hårdvara, vilket vanligtvis översätts till mer användbar grundläggande spänning, jämnare ström och ofta mindre motorljud och värme.
När SVPWM paras ihop med strömåterkoppling plus låg hastighets spännings-/flödeskompensation, känns många skalära drivningar mindre "mjuka" vid låg hastighet och håller hastigheten mer övertygande under moderata belastningsförändringar. För team som vill ha bättre beteende utan att ändra installationskultur kan den incrementella förbättringen vara genuint tilltalande.
Även med SVPWM, avkopplar inte skalär kontroll verkligen flöde och vridmoment. Vridmomentresponsen förmedlas fortfarande genom det indirekta förhållandet mellan spänning, flöde och glid. Under dynamiska krav reagerar drivningen ofta efter att motorläget redan har förändrats, vilket tenderar att kännas långsammare än metoder som reglerar vridmomentet direkt. Detta är anledningen till att SVPWM-förbättrad skalär kontroll ofta läses som en förfining snarare än en steg-förändring för högpresterande rörelser.
SVPWM kan ge mätbara vinster även om det inte ändrar något annat, men de större förbättringarna visar sig vanligtvis först efter att man har återbesökt installationsgrunderna som folk förståeligt nog rusar igenom under en start.
Inställningar som ofta avgör om SVPWM dyker upp i produktionen:
• Basfrekvens
• Motorens namnskyltdata
• Minimi frekvens
• Spännings-/IR-kompensation
• Strömbanor.
Många klagomål som kallas "låghastighetsinstabilitet" härstammar från konservativa strömbanor eller felaktiga motorparametrar snarare än PWM-metoden i sig, vilket kan vara en ödmjukande upptäckte under felsökning.
Generation 3: Vektorkontroll
Vad FOC Tillägger: Separata Handtag för Vridmoment och Flöde
Vektorkontroll omvandlar uppmätta fasströmmar till en roterande referensram så att flödesproducerande ström och vridmomentproducerande ström kan regleras oberoende, på ett sätt som liknar DC-motorens kontrollerbarhet. Vid denna fas förändras motorstyrningen från enkelt justeringsbeteende till direkt och exakt drivkontroll. Utbytet är starkare vridmoment vid låg hastighet och snabbare respons, eftersom vridmomentet blir en direkt hanterad variabel snarare än en bieffekt av glid.
Sensorlös vs. Sluten Loop Vektor: En Skillnad Du Känner på Maskinen
• Sensorlös vektorstyrning: uppskattar rotorposition/flux med hjälp av spänning, ström och en motormodell; minskar kablage och kostnad; används i stor utsträckning inom allmän industri; har tendens att kämpa vid noll hastighet eftersom back-EMF är liten och modellfel blir oproportionerligt inflytelserika.
• Sluten slinga vektorstyrning: använder en encoder eller resolver; levererar konsekvent noll-hastighet vridmoment och upprepningsbar dynamik; väljs ofta för lyftverk, spolar, hissar och precisionsrörelse; kan göra igångsättning mindre nervös när mekaniken är känslig för vridmomentvibrationer.
Parameter känslighet: Handeln du lever med efter uppstart
Vektorprestanda beror starkt på motorparametrar och flödesuppskattning. Flera effekter kan tyst flytta dessa parametrar under normal drift, och driften kommer endast att vara så säker som dess modell.
Källor till drift och mismatch som vanligtvis dyker upp i produktionen.
• Rotor tidskonstant drift
• Temperaturdriven stator resistans förändring
• Magnetisk mättnad vid högre last
• Lång motor kabel impedans och EMI effekter
Ett vanligt symptommönster uppträder när systemet fungerar smidigt medan kallt och lätt lastat, men senare blir mindre stabilt, bullrigare eller inkonsekvent vid hög temperatur eller tung last. Dessa situationer leder ofta antingen till misstro mot vektorstyrning eller till striktare finjustering och parameteridentifieringspraxis.
Finjusteringspraxis som vanligtvis ger lugnare installationer
Stabil vektorinstallationer delar ofta några vanor som inte låter glamorösa men förhindrar långa felsökningssessioner senare.
• Validera motordata under verkliga kabelinstallationer: kabel längd, utgångsreaktorer, jordning och installationslayout påverkar uppskattning och EMI på sätt som bänkinställningar sällan fångar.
• Använd roterande autotune när det är tillåtet: statisk finjustering kan vara bra för fläktar och pumpar, men högvridmoment låg hastighet arbete drar ofta nytta av roterande identifiering.
• Anpassa kontrollbandbredden till mekaniken: alltför aggressiva vridmomentloopar kan excitera kopplingar, backlash och resonanser; något långsammare men väl dämpat beteende ger ofta bättre genomströmning och färre störningar.
En praktisk regel för att välja läget utan att tänka för mycket på det
Om processen är känslig för låg-hastighet vridmoment eller förväntar sig snabb återhämtning från belastningssteg, minskar vektorstyrning ofta antalet obehagliga överraskningar senare, även om installationsinsatsen ökar. Om processen tål hastighetsfall och sällan arbetar nära noll hastighet, levererar skalarlägen ofta stadigare dag-till-dag beteende med färre reglage som kan ställas fel.
Generation 4: DTC (Direkt vridmomentstyrning)
Direkt vridmomentstyrning uppskattar statorflöde och vridmoment i statorreferensramen och väljer växelställningar för att hålla flöde och vridmoment inom hysteresband. Eftersom det undviker en del av den nästlade loopstrukturen som är typisk för FOC-implementeringar, kan det leverera mycket snabb vridmomentrespons och stark störningsejection. I tillämpningar där operatörer märker varje vridmomentförsämring som en produktdefekt eller en processstörning, kan denna snabbhet vara mer lugnande än en vackert slät vågform.
Fördelar som vanligtvis observeras.
• Snabb vridmomentrespons vid plötsliga belastningsförändringar
• Stark låg-hastighet vridmoment när uppskattningen förblir tillförlitlig
• En jämförelsevis direkt struktur som kan bete sig robust vid högre effekt nivåer.
Kostnader och begränsningar som kräver planering.
• Vridmomentvibrationer och variabel växelfrekvens
• Hysteresbeteende kan skapa hörbart brus och vridmomentpulsation som sticker ut i system med låg tröghet eller precision.
EMI och termisk designkomplexitet: variabel växling gör filterdesign komplicerat och kan förvärra motorns akustik om det inte hanteras.
Beroende av uppskattningens kvalitet: svaghet hos nära-noll-hastighetsobservers kan uppträda, liknande sensorlös vektor, även om implementationer varierar kraftigt beroende på leverantör.
DTC skiner ofta när vridmomenttransienter spelar en större roll än ultra-släta vridmoment, och där driften/motorns parning dimensioneras och integreras med den förväntningen. Inom tung industri handlar tilltal ofta mindre om toppspecifikationer och mer om att återhämta sig från störningar på ett sätt som förblir konsekvent utan känslig finjustering.
Generation 5: Matris AC–AC-omvandling
En matrisomvandlare konverterar AC-ingång direkt till AC-utgång utan en stor DC-länk cap bank. Det förändrar systemets personlighet: det kan förbättra ingångseffektsfaktorn, minska otympliga energilagringskomponenter och möjliggöra inneboende bidirektionell energiflöde. Samtidigt förändrar det modulationsbegränsningar, skyddsmetoder och kommutationskrav, vilket tenderar att öka samordningsbördan mellan kontroll- och krafthårdvara.
Matrisomvandling kräver noggrant timad commutation för att undvika kortslutning av ingångsfaser eller avbrott av induktiv strömflöde. Att uppnå stabil sensorlös beteende och stark låg hastighetstorke kräver vanligtvis högfidelitetsobservationer (flöde, torke, ibland hastighet), snabb realtidsberäkning och sofistikerad modulering som kan blanda PWM med hysteresis-liknande beslutlogik. När det görs bra kan torkerespons nå millisekundsskala beteende, men ingenjörens komfortmarginal är ofta smalare än med konventionella spänningskällaomvandlare (VSI) drifter, vilket kan göra team försiktiga om inte fördelarna tydligt uppväger den tillagda komplexiteten.
• Spänningsöverföringsförhållanden: praktisk maximal utspänning är begränsad relativt ingången, vilket kan minska höghastighetstorkemarginalen om inte systemet är utformat kring den.
• EMC och filtrering: att ta bort DC-länken omflyttar filtreringsbördan och kan komplicera efterlevnaden i elektriskt bullriga miljöer.
• Pålittlighetsavvägningar: att ta bort elektrolytkondensatorer kan förbättra livslängden i vissa arbetsprofiler, men omvandlaren introducerar mer komplexa switchnings- och skyddsbehov som förändrar var fel kan inträffa.
Matrisomvandlare rättfärdigas typiskt när bidirektionellt energiflöde, kompakthet, eller kondensatorlivslängd är avgörande, och när platsen kan stödja den ingenjörs- och underhållskompetens som följer. De är svårare att rättfärdiga när prioriteringar lutar mot snabb distribution, bred tjänstefamiliaritet, eller hög tolerans för parameterosäkerhet och "tillräckligt bra" motordata.
Genom dessa generationer förblir mönstret konsekvent: prestanda förbättras när torke och flöde går från framträdande beteende till uttryckligen reglerade variabler. Bytet är att varje steg uppåt tenderar att förlita sig mer på modeller, känslighetskvalitet, idrifttagningens disciplin och mekanisk kompatibilitet. En driftsätt som teoretiskt är starkare kan fortfarande överleverera när motordata är felaktiga, när det mekaniska systemet förstärker fluktuationer, eller när driften tillbringar tid nära en observatörs svaga område.
Egenskaper hos en VFD
VFD:er tenderar att förtjäna sitt rykte i mätt beteende, inte i broschyrens språk. Vad som brukar avgöra debatten, ofta efter några långa startmorgnar framför en panel, är hur konsekvent driften ändrar motorrespons under start, hastighetsförändringar och delbelastningsdrift. Det är de ögonblick när arvans pristansmetod vanligtvis handlar bort energi, smidighet, eller utrustningens livslängd.
I det dagliga ingenjörsarbetet är resultaten mer repetitiva när elektrisk prestanda och processförväntningar hanteras som en enda designtråd (kraftsystemgränser, motorvärmegränser och processdynamik som knyts samman), snarare än som två parallella checklistor som bara möts vid idrifttagningen.
Mjukstart och lägre elektrisk/mekanisk belastning

En avgörande egenskap hos en VFD är kontrollerad acceleration, genom att samordna spänning och frekvens under rampen. Med en start genom hela linjen landar oftast inrusningen i intervallet ~5–7× märkström, och nackdelarna visar sig snabbt.
Typiska biverkningar genom hela linjen:
• Spänningsfall
• Oönskade avstängningar
• Kontaktorns slitage
• Kopplings-/rem-/växellådschock.
Med en VFD-ramp stannar startströmmen ofta närmare ~1.2–1.5× märkström, även om verkliga siffror fortfarande beror på lastprofilen, accelerationstiden och torkebehoven. När den strömspiken undviks, känner människor på golvet vanligtvis av det innan någon räknar: färre förvånade blickar på brytstatusen, färre omstartningar mitt under skiftet, och ett lugnare kontrollskåp under måndagsmorgonsstarter.
Utrustning högre upp i kedjan drar också nytta av den mjukare elektriska profilen. Lägre inrusning minskar toppbelastningen på transformatorer, generatorer, och delade ledningar, och det minskar chansen att andra känsliga laster på samma buss upplever en kort undervolt. Vid fältfelsökning är detta en av de förändringar som tyst minskar frustrationen: “slumptaliga” avstängningar slutar vara slumpmässiga, och underhåll slutar jaga intermittenta symptom som var rotade i tuffa starter.
Eftersom torke kan hanteras medan hastigheten stiger, kan driften undvika den plötsliga torkespiken som direkt på linje-start ofta producerar. Det visar sig som mer förutsägbart mekaniskt beteende, särskilt på maskiner som redan har lärt teamet en del ödmjukhet.
Vanliga mekaniska resultat när torkerampen är välformad: längre remliv; färre kopplingsfel; minskade vridmomentoscillationer i roterande tåg.
I många anläggningar är den praktiska skillnaden inte huruvida lasten startar en gång, utan huruvida den startar på samma sätt varje gång. Laster med hög brytfriktion, klibbigt material eller kalla lager svarar ofta bättre när rampen justeras med avsikt snarare än gissningsvis. Stabil och förutsägbar uppstarts beteende ökar förtroendet under normal drift.
En accelerationsramp som är för aggressiv kan fortfarande skapa strömtoppar och mekaniska stötar. En alltför långsam ramp kan pressa motorn mot överhettning vid låg hastighet när fläktkylningen är svag eller när vridmomentkraven förblir höga.
En idrifttagningsmetod som vanligtvis känns stabilare (och är lättare att försvara senare) är att börja med en konservativ acceleration, för att sedan förkorta den endast när processen verkligen gynnas, medan man övervakar en liten mängd signaler som sällan ljuger:
Signal att trenda under rampjustering:
• Drivutgångsström
• Motortemperatur (eller termisk modell)
• Vibrationsförändringar
• Återkommande startkonsekvens
Bredbandig, smidig hastighetskontroll genom frekvensvariation

En annan definierande egenskap är hastighetskontroll utan mekanisk omarbetning. Istället för att ändra polpar eller lägga till växelnivåer varierar VFD den levererade frekvensen. För en induktionsmotor uttrycks synkronhastighet och rotorns hastighet vanligtvis som:
n₀ = 60f / P
n = 60f(1 − S) / P
Där f är frekvens, P är antalet poler, och S är glid. Att variera f möjliggör smidiga hastighetövergångar samtidigt som man håller glid inom ett område som styrenheten kan hantera. I praktiken översätts det till stadigare processbeteende: transportband kan matcha uppströms/nedströms hastigheter, pumpar kan följa efterfrågan, och fläktar kan hålla tryckinställningar utan den stopp-start cykling som sliter på både hårdvara och tålamod.
En punkt som ibland förbises, tills skrot eller omarbete gör det smärtsamt uppenbart, är att smidig hastighetskontroll inte bara handlar om bekvämlighet. Minskat processvariation sänker ofta operatörens ingripanden, och det kan trimma kvalitetsförluster som aldrig syns på energimätaren.
VFD-kontroll ger tydlig avkastning när processen spenderar verklig tid bortom märkoshastighet. Istället för att köra i full hastighet och kassera överskottet genom throttling eller dämpning kan systemet fungera närmare vad lasten faktiskt kräver vid det tillfället. Det förbättrar generellt stabiliteten och minskar slitaget på kontrollkomponenter som annars spenderar sitt liv med att kämpa mot maskinen.
Komponenter som ofta ser mindre slitage när hastighet används för kontroll:
• Dämpventiler
• Inloppsdämpare
• Bypassvägar
• Mekaniska bromsar som används för pacing
Glid S är mer än en variabel i en ekvation; det återspeglar hur motorn utvecklar vridmoment under belastning. Drivkontroll hanterar glid indirekt genom att samordna spänning och frekvens så att motorn kan producera vridmoment utan att dra för mycket ström.
Vid idrifttagning hjälper det att se på vridmomentets efterfrågan över hela hastighetsintervallet, inte bara vid en bekväm medelhastighetspunkt. Inställningar som känns bra vid medelhastighet kan bli besvikande nära låg hastighets vridmomentstoppar, och den besvikelsen tenderar att dyka upp vid de minst bekväma tillfällena, under kalla starter, tunga omgångar, eller efter en processstörning.
Hög energibesparingspotential vid variabla vridmomentlaster

Energi-reduktion är ofta starkast på variabla vridmomentlaster som fläktar och centrifugalpumpar. Affinitetslagarna förklarar formen av besparingarna:
Affinitetsrelationer:
• Flöde ∝ Hastighet
• Tryck/Höjd ∝ Hastighet²
• Effekt ∝ Hastighet³
Eftersom effekt skalas med hastighetens kub, kan även modest hastighetsminskningar producera stora effektminskningar. Detta är anledningen till att dämpventiler och inlopp dämpare ofta ligger efter med hastighetsminskning när efterfrågan varierar: throttling avger energi som tryckförlust, medan hastighetskontroll minskar den energi som systemet behöver generera från början.
I driftsmiljöer är skillnaden vanligtvis synlig på mer än ett ställe, vilket är tillfredsställande på ett mycket praktiskt sätt eftersom det förstärker att kontrollstrategin gör det som modellen förutspådde:
Vanliga driftsignaler för minskad efterfrågan vid lägre hastighet:
• Lägre kW-dragning
• Tystare drift
• Mindre värme i systemet
• Färre serviceanrop för ventiler och dämpare
Från ett professionellt perspektiv tenderar de besparingar som håller över tid att komma från att betrakta VFD som en del av kontrollstrategin (inställningar, gränser och feedback), snarare än som en manuell hastighetsknopp som driver med vanor och skiftspecifika preferenser. När driften integreras med tydlig logik, tryck, flöde, eller temperaturkontroll med skyddsnät, förblir resultaten vanligtvis stabila även när operatörer ändras.
Många system arbetar vid delbelastning under de flesta av sina drifts timmar. En VFD anpassar motorens ingångseffekt till den verkliga efterfrågan istället för att tvinga full hastighets drift och "hantera ner" med förluster. Det minskar ofta energiförbrukningen samtidigt som det lättar på mekanisk belastning, eftersom systemet körs med mindre turbulens, mindre dämpningsförlust och färre snabba kontrolloscillationer som irriterar utrustning och operatörer alike.
Ett enkelt sätt att bekräfta besparingar är att jämföra verklig effekt (kW) vid stabila driftpunkter innan och efter hastighetskontroll implementeras, snarare än att förlita sig enbart på namnskaps antaganden. Denna mätning-först vana tenderar att förhindra obekväma samtal senare, särskilt när systemkurvor, minimiflödesbegränsningar och kontrolljusteringar påverkar resultatet.
Fältfaktorer som vanligtvis flyttar resultaten bortom läroboksuppskattningar:
• Systemkurvans form
• Minimi flödes och tryckbegränsningar
• Sensorplacering
• PID-justering
• Omlednings eller recirkulationsbeteende
VFD Egenskaper
En VFD:s avgörande egenskaper kan sammanfattas i tre resultat inriktade teman, formulerade på samma sätt som människor använder när de avgör om installationen "fungerade":
(1) Mjukare starter med lägre insignalström och mindre elektrisk/mekanisk stress.
(2) Mjuk, bred hastighetskontroll genom frekvensvariation med kontrollerat glidbeteende.
(3) Stark energibesparing på variabelt vridmoment belastningar eftersom effekten faller snabbt när hastigheten minskas.
När dessa teman tillämpas med praktisk justering och processmedveten kontroll logik, tenderar resultaten att vara konsekventa över skift och säsonger, vilket ofta är vad team faktiskt vill ha: färre överraskningar, färre stopp-här-händelser och prestanda som förblir stabil efter att commissioning-teamet lämnar.
Slutsats
VFD-prestanda beror på mycket mer än att bara ändra motorhastighet. Stabil drift kräver noggrann samordning av frekvens, spänning, strömreglering, motor parametrar, termiska förhållanden och belastnings beteende. Olika kontroll strategier balansera vridmomentrespons, effektivitet, stabilitet och dynamisk prestanda baserat på applikationens behov. När industriella system kräver högre effektivitet, precision och tillförlitlighet, fortsätter VFD-teknologin att utvecklas genom förbättrade kontrollmetoder, skyddssystem och kraft elektroniska designer som stödjer moderna motor-drivna applikationer.
Vanliga frågor [FAQ]
1. Varför reglerar en VFD spänning tillsammans med frekvens istället för att bara ändra frekvensen?
En VFD justerar både spänning och frekvens för att hålla motorns magnetiska flöde inom ett stabilt driftsområde. Om frekvensen sjunker utan korrekt spänningsjustering, försvagas flödet och vridmomentkapaciteten faller kraftigt, särskilt vid låg hastighet. Om spänningen förblir för hög för den operativa frekvensen kan motorn dra en överdriven magnetiseringsström, vilket ökar värmen och belastar isoleringssystemet. Att koordinera spänning och frekvens gör det möjligt för driften att bibehålla användbart vridmoment, stabil ström beteende och förutsägbar termisk prestanda över föränderliga lastförhållanden.
2. Varför kommer många VFD-problem som spåras till motorer faktiskt från drivens ingångssida?
Många problem som skylls på motorer orsakas egentligen av hur likriktarsteget interagerar med den elektriska försörjningen. Standarddiode likriktare drar icke-sinusformad ström, vilket introducerar harmoniska och kan destabilisera svaga kraftsystem med hög källa impedans. Symptom såsom oönskade avbrott, transformator uppvärmning, spänningsinstabilitet eller intermittenta fel uppträder ofta från förhållandet mellan driften och det inkommande kraftsystemet snarare än från motorn själv. Ingångssida komponenter som linjereaktorer, DC-länk choke och EMI-filter läggs ofta till för att stabilisera dessa interaktioner.
3. Varför betraktas DC-länk kondensatorer som en av de mest stressade komponenterna inuti en VFD?
DC-länk kondensatorer absorberar ripple ström, stabiliserar buss spänningen och lagrar temporärt energi under snabba belastningsförändringar. Med tiden försämrar kontinuerlig termisk stress och ripple-ström exponering gradvis kapacitets prestanda. En drivning kan fortsätta fungera även när kapacitansen försämras, vilket kan göra problemet svårt att upptäcka initialt. Så småningom blir driften mer känslig för spänningsfall, regenerativa händelser och transienta belastningsändringar, vilket ofta ger oförklarliga avbrott eller instabilt beteende innan uppenbar kapsylfel inträffar.
4. Varför förbättrar ökning av PWM-bärfrekvens motorakustik men ökar termisk stress inuti driften?
Högre PWM bärare frekvens ger mjukare motorström och minskar hörbar brus genom att flytta växling harmoniker över det mest märkbara hörselområdet. Men varje växling händelse genererar förluster inne i IGBT:erna och kraftelektronik. När växlingsfrekvensen stiger ökar förlusterna i omvandlaren och intern uppvärmning avsevärt. Detta skapar en praktisk teknikbalans mellan tystare motoroperation och att bibehålla ett acceptabelt termiskt marginal inne i VFD:n. I många installationer påverkar justering av bärfrekvensen direkt långsiktig tillförlitlighet och kylkrav för höljet.
5. Varför utlöser regenerativa laster vanligtvis DC-överspänningsfel under nedbromsning?
När en motor bromsar in eller drivs av lasten själv, börjar den agera som en generator och återför energi till DC-bussen. Om den regenererade energin kommer in i bussen snabbare än den kan avledas eller återföras till nätet, stiger DC-spänningen snabbt och utlöser överspänningsskyddet. Detta beteende påverkas starkt av lasternas tröghet och nedbromsningsaggressivitet. Många överspänningsproblem löses genom att förlänga nedbromsningsramper eller korrekt dimensionera bromsmotstånd och regenerativ hårdvara för att matcha den verkliga mekaniska energin som lagras i systemet.
6. Varför presterar vektorkontroll vanligtvis bättre än skalär V/Hz-kontroll vid låga hastigheter och under laständringar?
Skalär V/Hz-kontroll reglerar motorbeteendet indirekt genom att upprätthålla ett ungefärligt spännings-till-frekvens-förhållande, vilket fungerar bra för förutsägbara laster som fläktar och pumpar. Vektorkontroll, särskilt fältorienterad kontroll (FOC), reglerar direkt momentproducerande och flödesproducerande strömkomponenter separat. Detta gör att driften kan reagera mycket snabbare på laständringar och bibehålla starkare moment även nära nollhastighet. Skillnaden blir särskilt märkbar i tillämpningar som involverar snabb acceleration, tung startmoment eller känsliga hastighetsregleringskrav.
7. Varför kan vektorkontrollerade drivsystem bli instabila efter temperaturförändringar eller motorbyte?
Vektorkontroll beror starkt på korrekt uppskattning av motorparametrar. Rotorresistens, statorresistens, magnetisk mättnad och kabelimpedans kan alla förändras under verkliga driftförhållanden. Temperaturförändringar och motorbyten ändrar ofta dessa parametrar tillräckligt för att minska uppskattningsnoggrannheten, särskilt vid låga hastigheter där observationsmodeller blir känsligare. System som initialt fungerar smidigt kan senare utveckla brus, instabilt momentrespons eller inkonsekvent hastighetsreglering om motormodellen inte längre speglar det verkliga elektriska beteendet.
8. Varför anses autotuning vara ett av de viktigaste stegen under VFD-installationen?
Autotuning justerar drivsystemets kontrollmodell med motorns faktiska elektriska egenskaper istället för att bara förlita sig på namnskyltsvärden. Detta förbättrar strömreglering, momentrespons, glidsuppskattning och beteende vid låga hastigheter. I många installationer är autotuning det punkt där systemet övergår från att bara fungera till att fungera smidigt och förutsägbart. Rotationsautotuningprocedurer är särskilt värdefulla för tillämpningar som kräver starkt låg hastighet moment eller exakt transienta respons eftersom de fångar motorbeteende under verkliga driftförhållanden.
9. Varför minskar VFD:er avsevärt energiförbrukningen på pumpar och fläktar jämfört med throttlingmetoder?
För centrifugalpumpar och fläktar följer effektförbrukningen affinlagarna, där kraften ändras ungefär med hastighetens kub. Detta innebär att även måttliga hastighetsreduceringar kan ge betydande energibesparingar. Traditionella throttlingmetoder tvingar motorn att löpa med full hastighet samtidigt som flödet mekaniskt begränsas, vilket slösar energi som tryckförlust. En VFD minskar istället motorhastigheten direkt så att systemet bara producerar det erforderliga flödet eller trycket, vilket sänker effektbehovet vid källan istället för att avleda överskottenergi.
10. Varför ökar snabba moderna VFD-teknologier oro över EMI och lagerström?
Moderna PWM-drivsystem, särskilt de som använder SiC eller GaN-switchningarheter, genererar extremt snabba spänningsövergångar med hög dV/dt. Dessa snabba kanter kan skapa gemensamma-läges spänningar, elektromagnetisk interferens och avledande axelströmmar som passerar genom motorlager. Om jordning, kabelskärning, filtrering och bindningsmetoder är dåligt utförda kan resultatet inkludera för tidigt lagerförslitning, bullriga sensorer, kommunikationsinstabilitet eller isolationsstress. I högpresterande installationer blir kvaliteten på ledningar och jordning ofta lika viktig som kontrollalgoritmen själv.
Besläktad blogg
-
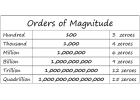
Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?
![Hur många nollor i en miljon, miljarder biljoner biljoner biljetter?]()
2024/07/29
Miljoner representerar 106, en lätt greppbar siffra jämfört med vardagliga artiklar eller årslöner. Miljarder, motsvarande 109, börjar sträcka ... -
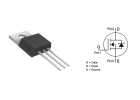
IRLZ44N MOSFET -datablad, krets, motsvarande, pinout
![IRLZ44N MOSFET -datablad, krets, motsvarande, pinout]()
2024/08/28
IRLZ44N är en allmänt använt N-kanals Power MOSFET.Det är känt för sina utmärkta växlingsfunktioner och passar mycket för många applikatione... -
Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?
![Batteritemperaturen för låg, laddningen stannade.Hur fixar jag det?]()
2024/10/6
Problem med avladdning av batteriladdning av mobiltelefoner är vanliga men kan hanteras effektivt.Temperaturen spelar en stor roll i batterieffektivi... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024/07/4
BC547 -transistorn används vanligtvis i en mängd elektroniska applikationer, allt från grundläggande signalförstärkare till komplexa oscillatork... -
Omfattande guide till SCR (kiselstyrd likriktare)
![Omfattande guide till SCR (kiselstyrd likriktare)]()
2024/04/22
Kiselstyrda likriktare (SCR) eller tyristorer spelar en viktig roll i kraftelektroniktekniken på grund av deras prestanda och tillförlitlighet.Den h... -
LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare
![LR621, SR621SW, 364, AG1 -batteriekvivalenter och ersättare]()
2024/07/15
LR621- och SR621SW -knappbatterier är utbredda i kompakta elektroniska enheter som klockor, små leksaker, kalkylatorer och fjärrnycklar.Flera tillv... -
Grundläggande av op-amp kretsar
![Grundläggande av op-amp kretsar]()
2023/12/28
I den komplicerade elektronikvärlden leder en resa till dess mysterier alltid oss till ett kalejdoskop av kretskomponenter, både utsökta och komple... -
En komplett guide till multiplexerare och deras roll i digitala system
![En komplett guide till multiplexerare och deras roll i digitala system]()
2025/09/20
Multiplexerare är komponenter i digitala system, utformade för att kanalisera flera insignaler till en enda utgångslinje med binära logik och styr... -
Jämförelse av NMO: er och PMOS -skillnader och applikationer
![Jämförelse av NMO: er och PMOS -skillnader och applikationer]()
2024/11/15
Att förstå skillnaderna mellan NMO: er och PMOS -transistorer är viktigt för att utforma effektiva kretsar.NMO: er (N-typ metall-oxid-halvledare) ... -
CR2450 vs CR2032 Jämförelse: allt du behöver veta
![CR2450 vs CR2032 Jämförelse: allt du behöver veta]()
2025/09/15
Knappbatterier som CR2450 och CR2032 driver många vardagliga elektronik, från klockor och fjärrkontroller till medicinska och industriella enheter....




Heta delar
- K4S511632B-TC75
- M52067FP
- RC82573L
- ACPM-9007-BLK
- ICS950812CGLF
- M28W800CB70ZB6
- IDT71V321L55PFI
- 08051A270FAT2A
- CL05B473KO5NNND
- HD6432635UA81FJ
- LX62UL256SC-45
- UVR1H470MED1TD
- MC14495P1
- AD5258BRMZ10
- CM200YE4-12F
- RN73C1E10K7BTDF
- MT89L80AP1
- XC9536PC44AEM-15C0001
- DMN2046U-7
- CXB1443R-T4
- NT7167FG-00033
- CY7C68013A-128AXC
- SN74LVC2244ADGVR
- 74ACT843SPC
- RT1206DRD071KL
- NC7SZ332L6X
- LC1117CLTR18
- A42MX16-TQG176
- HY5DU283222AF-28
- M82520-14
- VI-2W0-CW/F1
- PI5A126U
- 06033A100JAT4A
- TAJT105M020RNJ
- XZFABBA10A
- LM1117IMP-5.0/NOPB
- ADE7878AACPZ-RL
- TLV320AIC24KIPFB
- AM3352BZCEA60
- STD4NK50ZT4
- T495D226M020ZTE200
- ICS1562BMLF
- K3RG4G40MM-MGCJT00E
- LCMX02-7000HC-4FG484I
- MC74HC4052AG
- UPD65029GD-083-5BB
- LM66100DCK
- SN27546YPHR.B1
- GLS85LS1002P-S-I-FZJE-TT095
- TPS826711SIP